안녕하세요, 연구실 막내 김기현입니다😁
여름 URP 하고 나서 얼마 지나지 않은 것 같은데 벌써 한 학기가 지나고 새해를 앞두고 있습니다…
우선 제 생활 근황은 마지막 부분에서 말씀 드릴려고 하고, 우선은 제가 요즘에 관심있게 본 것부터 말씀드릴려고 합니다.
1. 반도체 시장
저는 고3때부터 반도체의 성능에 대한 성장이 기대가 되어서 계속 지켜봐 왔는데요, 올해도 어김없이 다양한 회사들에서 인공지능 학습이나 반도체의 성능 향상을 위해서 신기한 기술들을 가져온 것을 볼 수 있었습니다. 제가 비전공자라서 자세한 내용은 설명드리기에 어렵지만 간략하게나마 연구실 분들께 제가 보던 내용들을 소개드리고 싶어서 들고 왔습니다.
재미 없으신 분은 아래에 결론으로 넘어가셔도 됩니다😪
AMD
최근 들어 AMD뿐만 아니라 전반적인 반도체 업계에서, 칩을 생산하는 실리콘 웨이퍼 자체를 어떻게 활용할 것인가에 대한 고민이 점점 더 깊어지고 있는 것으로 느껴집니다. 그중에서도 AMD는 이러한 문제의식에 대해, 칩을 어떻게 나누고 어떻게 연결할 것인가라는 방향에서 적극적으로 해법을 모색하고 있다고 생각되었습니다.
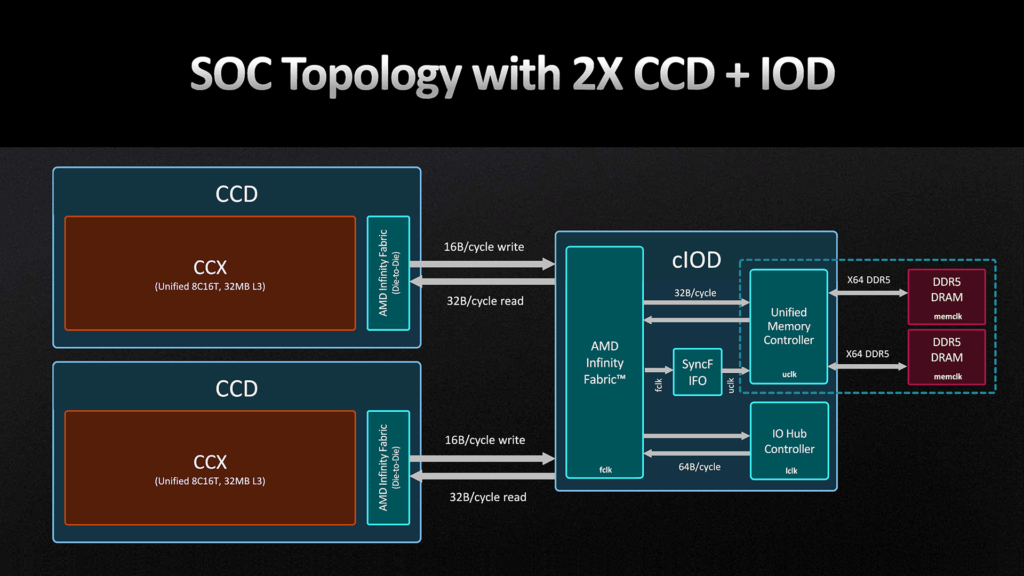
우선 AMD의 경우, 하나의 칩에 모든 기능을 집적하는 대신 CCD와 cIOD로 역할을 분리하는 구조를 채택하였습니다. 이를 통해 하나의 실리콘 웨이퍼에 모든 회로를 담아야 할 필요가 없어졌고, 기능별로 다른 웨이퍼에서 칩을 생산할 수 있게 되면서 결과적으로 수율을 높이는 효과를 얻을 수 있었습니다.
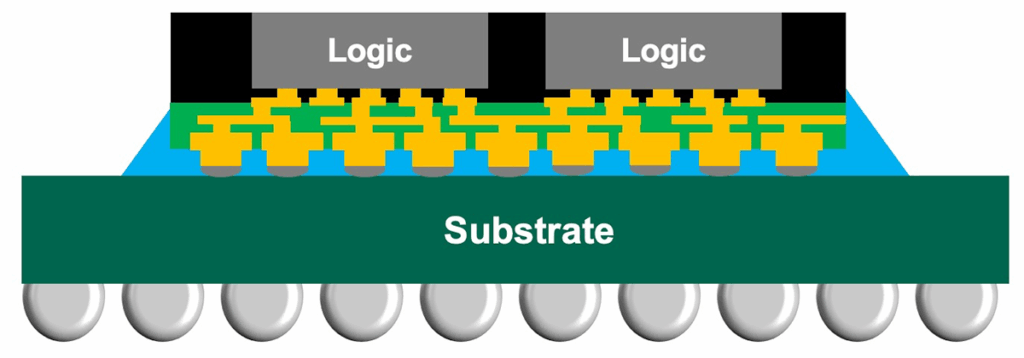
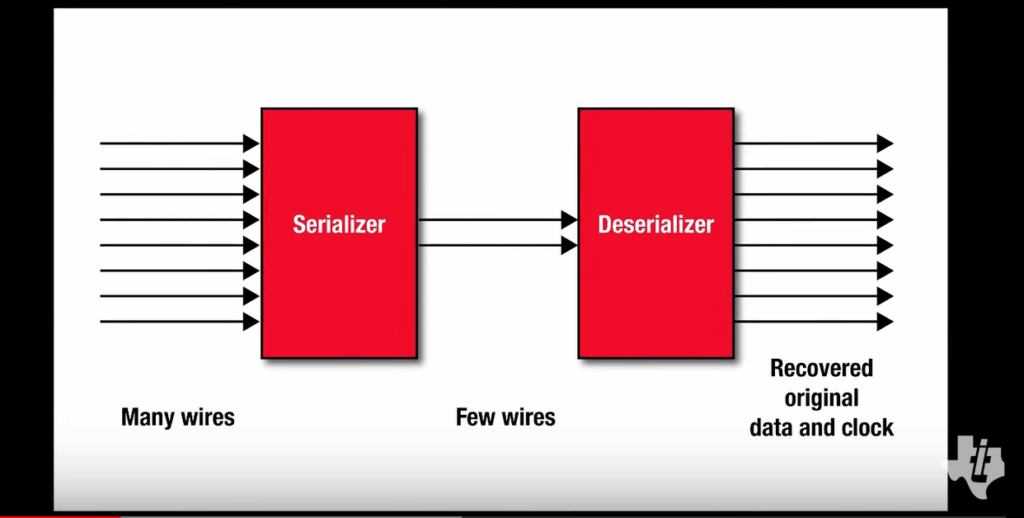
다만, 이러한 방식이 항상 장점만 가지는 것은 아닙니다. 단일 die 내부에서는 통신 문제를 크게 고민할 필요가 없지만, die를 여러 개로 나누어 서로 연결하게 되면 기판 위에 배치해야 할 배선 수가 증가하고, 이로 인해 노이즈, 전송 지연과 같은 문제가 자연스럽게 발생하게 됩니다. 이러한 한계를 보완하기 위해 AMD는 칩을 3차원적으로 적층하는 방식과 함께, SerDes와 같은 데이터를 압축·인코딩하는 통신 기법을 활용하여, 칩 간 통신에서 꼭 필요한 정보만 효율적으로 전달하는 전략을 선택하였습니다.
자세한 내용은 아래에 첨부된 링크에서 외국인 분이 매우 잘 설명해 주고 있으므로, AMD에 대한 설명은 여기까지로 하고 다음 내용으로 넘어가도록 하겠습니다.
intel
인텔은 TSMC의 생산 공정에 의존하던 기존 흐름에서 벗어나, 자신들의 자체 공정을 다시 전면에 내세우는 전략을 선택하였습니다. 이를 위해 18A 제조 공정을 핵심으로 활용하며, 인텔은 이 공정을 통해 자체적인 제조 방식뿐만 아니라 성능까지 함께 향상시켰다고 설명하고 있습니다.
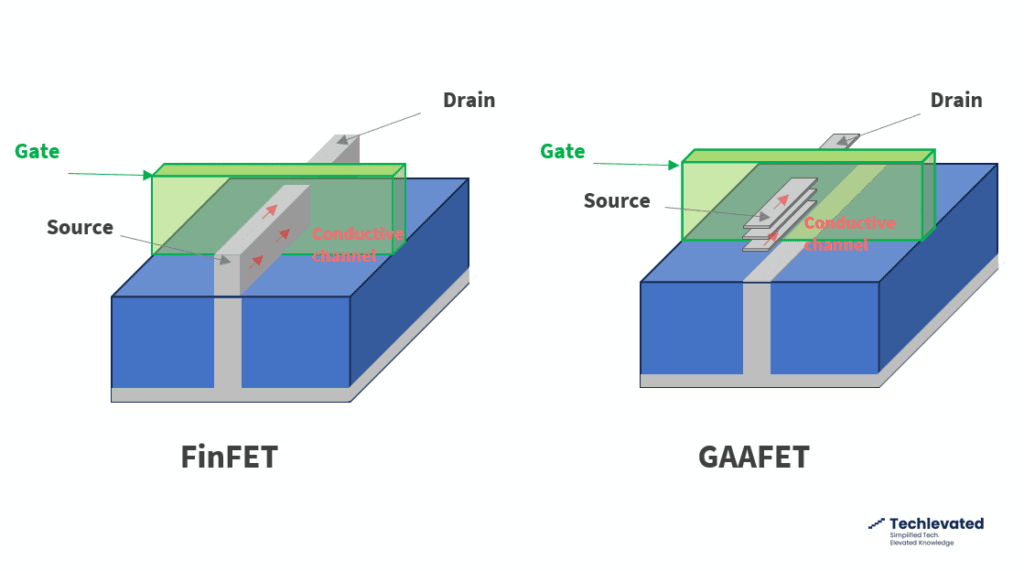
특히 이번에 출시를 예고한 Panther Lake와 Clearwater Forest의 경우, 기존의 FinFET 구조가 아닌 GAA(Gate-All-Around) 방식을 적용하여 전력 누수를 줄이고 효율을 개선하였습니다. 여기에 더해, 트랜지스터에 전력을 공급하는 회로를 별도로 분리하는 구조를 도입함으로써, 전력 전달 경로를 단순화하고 회로 설계의 복잡도를 낮추는 방향으로 발전시켰습니다. 또한 패키징 측면에서는 TSMC가 주로 사용하는 방식과는 달리, 하이브리드 본딩(Hybrid Bonding) 기술을 적극적으로 활용하여, 기존 TSV 중심 구조에서 벗어나 보다 미세하고 효율적인 다이 간 연결 방식을 보여주고 있습니다.
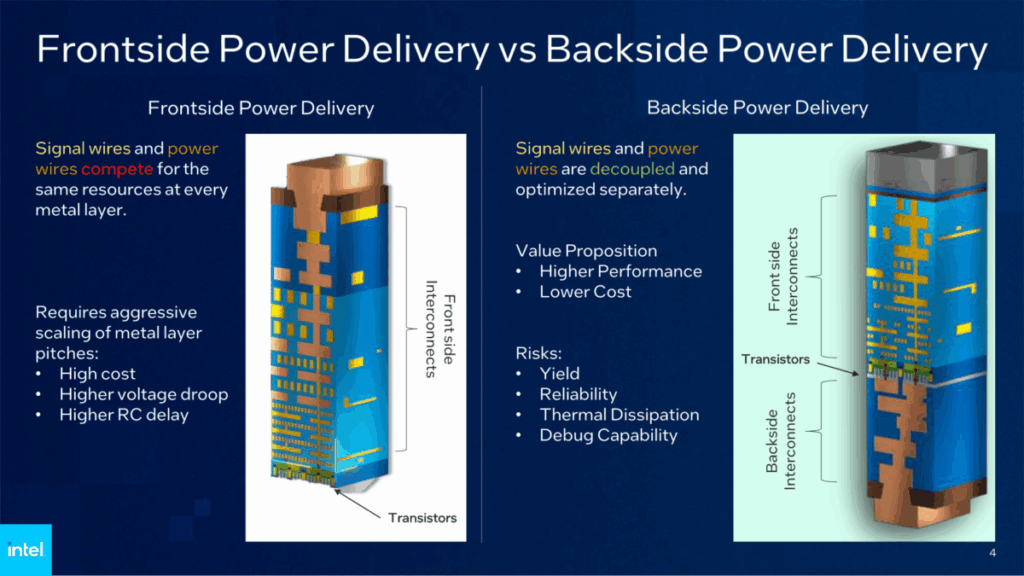
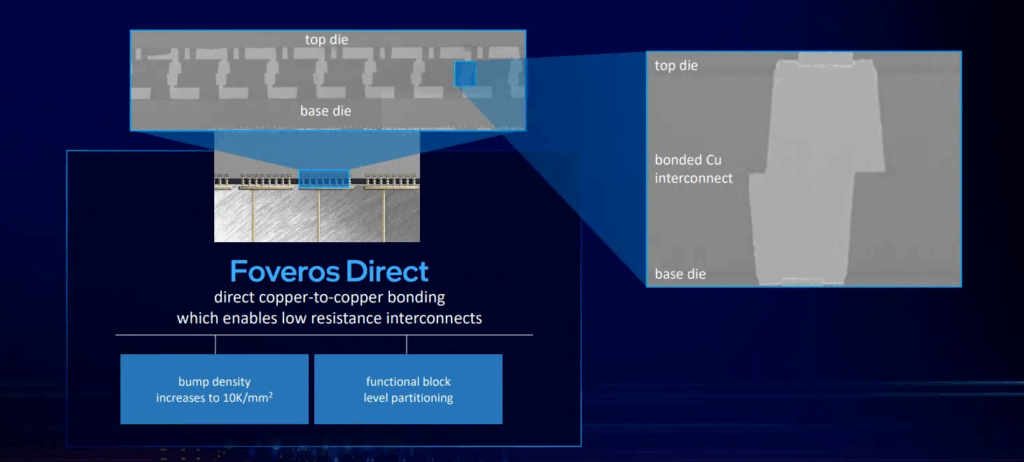
결과적으로 인텔은 그동안 다소 부정적으로 평가받아 왔던 흐름을 뒤집기 위해, 공정·트랜지스터 구조·전력 전달·패키징에 이르기까지 다양한 기술을 동시에 적용하며 전반적인 효율을 끌어올리는 전략을 취하고 있다고 보시면 될 것 같습니다. 이에 대한 보다 자세한 내용은 아래에 첨부된 유튜브 영상에서 잘 설명되어 있으므로, 함께 참고하시면 이해에 도움이 될 것 같습니다.
NVIDIA
엔비디아는 내년에 NVIDIA의 차세대 아키텍처인 Rubin을 발표할 예정인데요, Rubin은 단순히 연산 성능이 향상된 것뿐만 아니라 서버 랙 차원에서 Transformer 추론에 사용되는 KV 캐시를 처리하는 방식이 상당히 독특하다는 점이 주목할 만합니다. 기존에는 KV 캐시를 대부분 HBM에 올려두고 사용하는 구조였다면, Rubin 서버 랙에서는 KV 캐시의 중요도가 시간에 따라 달라진다는 점에 착안하여, 상대적으로 오래된 KV 캐시는 중요성이 낮다고 판단하고 이를 GDDR 계열 메모리로 옮겨 저장하는 방식을 제시하였습니다.
이러한 방식을 적용하게 되면, 모든 KV 캐시를 고비용의 HBM에 유지할 필요가 없어지기 때문에, HBM 용량 대비 훨씬 큰 규모의 KV 캐시를 운용할 수 있게 됩니다. 이는 곧 LLM 추론 과정에서 필요한 컨텍스트 길이를 더 길게 가져가면서도, 전체 시스템 비용과 자원 활용 측면에서 효율을 크게 높일 수 있음을 의미합니다. 정리하자면, 자주 접근되는 Hot KV 캐시는 HBM에 두어 즉시 활용하고, 상대적으로 덜 중요한 Cold KV 캐시는 GDDR 메모리에 저장하는 계층적 메모리 구조를 적용한 것입니다. KV 캐시는 학습 단계에서는 큰 부담이 되지 않지만, 추론 단계에서는 입력 길이에 비례하여 메모리 사용량이 급격히 증가하기 때문에, 엔비디아는 이러한 특성을 고려해 해당 구조를 설계했다고 볼 수 있습니다.
자세한 내용은 아래에 첨부된 유튜브 영상에서 보다 직관적으로 잘 설명해 주고 있으니, 함께 참고하시면 이해에 도움이 될 것 같습니다.
구글은 기존부터 자신들의 대형 서버 인프라에 최적화된 형태로 TPU를 설계해 온 기업입니다. TPU는 비교적 오랜 기간 사용되어 왔지만, 외부에서는 큰 주목을 받지 못했던 것이 사실입니다. 그러나 최근 Google의 Gemini 3 성능이 크게 향상되면서, 자연스럽게 TPU에 대한 관심 역시 함께 높아지게 되었습니다.
구글의 TPU는 칩 하나만 놓고 보았을 때, 절대적인 단일 칩 성능이 매우 뛰어나다고 보기는 어렵습니다. 대신, 서버 규모에서 여러 TPU 칩을 촘촘하게 연결하고, 작업을 여러 칩에 분산하여 처리하는 구조를 통해 전체 시스템 차원에서 높은 성능을 만들어내는 방식을 취하고 있습니다. 즉, 대형 서버 인프라 환경에서는 칩 간 통신 지연이 사용자에게 크게 체감되지 않기 때문에, 텐서 연산에 특화된 여러 TPU들이 각자 연산을 나누어 맡아 동시에 처리함으로써 높은 처리량을 확보할 수 있다고 볼 수 있습니다.
이러한 구조는 특히 토큰 단위로 연산이 확장되는 방식의 워크로드에서, 규모가 커질수록 비용 효율이 더욱 좋아지는 특성을 보입니다. 결과적으로 TPU는 개별 사용자용 가속기라기보다는, 대규모 서버 인프라를 직접 운영하는 환경에서 가장 잘 맞도록 설계된 칩이라고 정리할 수 있습니다. 그리고 바로 이러한 이유 때문에, 최근 Gemini의 성능 향상과 함께 TPU의 설계 철학과 장점이 다시금 주목받고 있다고 마무리할 수 있을 것 같습니다.
이것도 제가 공부했던 자료가 있었던 것 같은데 기억이 안나서 추가로 물어보시면 찾아드리겠습니다…
Apple
애플은 Apple이 TSMC의 최신 실리콘 공정을 비교적 먼저 사용할 수 있는 계약 구조를 확보하고 있기 때문에, 공정 자체만으로도 충분히 높은 성능을 끌어낼 수 있는 위치에 있습니다. 여기에 더해 애플은 단순히 공정 이점에만 의존하지 않고, 통합 메모리(Unified Memory) 구조, ARM 기반 아키텍처, 그리고 P코어와 E코어를 적절히 분리·활용하는 설계를 바탕으로 인공지능 워크로드를 효율적으로 처리할 수 있는 하드웨어를 꾸준히 제공하고 있습니다. 이러한 요소들이 결합되면서, 애플 실리콘은 전력 효율과 성능을 동시에 고려한 AI 친화적인 구조를 갖추게 되었다고 볼 수 있습니다. 그래서 결론적으로 애플은 SoC 기반의 구조에서 전력 효율과 성능을 최적화 하는 것을 목표로 하고 있는 것 같다고 느꼈습니다.
또한 최근 업데이트된 macOS에서는, Thunderbolt를 이용해 여러 대의 Mac을 직접 연결하고, 학습과 추론에 대한 작업을 여러 기기에서 분할하여 실행할 수 있는 기능 역시 지원하고 있습니다. 이는 단일 기기의 성능을 넘어, 비교적 간단한 구성만으로도 소규모 분산 연산 환경을 구성할 수 있다는 점에서 의미가 큽니다. 이런 흐름을 종합해 보면, 애플 역시 인공지능을 클라우드에만 의존하는 것이 아니라, on-device 환경에서 직접 구동할 수 있는 하드웨어적 기반을 단계적으로 마련해 가고 있다고 생각해볼 수 있습니다.
자세한 내용은 아래에 첨부된 유튜브 영상에서 실제로 연결해서 사용했을 때의 성능을 분석하는 영상이 있으니 참고하시면 이해에 도움이 될 것 같습니다.
결론
제가 이렇게 반도체 이야기를 꺼내면서 하고 싶었던 핵심은, 인공지능 모델의 크기를 줄이거나 압축하는 노력만큼이나, 이를 실제로 구동하는 장치의 기술 발전 역시 매우 빠르게 이루어지고 있다는 점이었습니다. 반도체 시장은 매번 새로운 방식으로 전력 효율을 개선하고 성능을 끌어올리며, 공정 기술까지 지속적으로 발전해 왔기 때문에, 이러한 흐름 자체가 인공지능 발전의 중요한 기반이 되고 있다고 느껴집니다.
이러한 관점에서 보면, 앞으로의 인공지능 시장에서는 반도체 성능이 함께 향상되는 동시에 인공지능 모델 역시 더 커지고 정교해지면서, 결과적으로 굳이 최적화된 모델이 나오지 않아도 나중에는 사람들이 원하는 방향에 더 잘 맞추어 학습된 인공지능이 등장하지 않을까라는 개인적인 생각을 해보게 되었습니다.
2. 로봇 하드웨어
최근 제 알고리즘에서 직접 설계한 로봇 모델을 3D 프린팅으로 제작하여, 구조 자체만으로도 부드러운 움직임과 자연스러운 모션을 만들어낼 수 있다는 영상들이 자주 보이기 시작했습니다. 3D 프린팅 부품에 베어링을 적절히 배치하고, 최소한의 CNC 가공 부품만 사용한 뒤 단순한 모터를 결합하는 방식인데, 이런 구조만으로도 가속과 감속이 자연스럽게 이어지는 점이 상당히 인상적으로 느껴졌습니다. 물론 이러한 구조가 인공지능 학습을 위한 실시간 제어에서는 오히려 불리하게 작용할 수도 있겠다는 생각은 들었지만, 나중에 기회가 된다면 직접 구조를 설계해서 자연스러운 움직임을 보여주는 로봇팔을 만들어보고 싶다는 생각도 함께 들었습니다.
그리고 이번 학기에 공업수학을 수강하면서, 교수님께서 학기 말에 인공지능 로봇 제어에 미분방정식을 도입해보는 것은 어떻겠냐는 이야기를 해주셨는데, 최근 로봇을 학습한 인공지능 모델들을 살펴보니 실시간으로 반응하며 다음 action으로 넘어가는 과정에서 항상 자연스러운 움직임이 보장되지는 않는 경우가 많았던 것 같다는 느낌을 받았습니다. 이런 점을 생각해보면, 강화학습이나 정책 네트워크만 바라보기보다는, 조금 더 원초적인 로봇 제어 이론과 연속적인 동역학 모델을 함께 공부해보는 것도 의미가 있지 않을까라는 생각이 들었습니다.
마지막으로 간략하게 로봇 제품의 동향을 말씀드리자면 , 결국에는 사람과 유사한 형태의 로봇을 계속해서 실험하고 있다는 점이 특히 인상적이었습니다. 그중에서도 1X Technologies의 NEO는, 단순히 하드웨어 성능을 넘어서 사용자의 보안과 프라이버시를 소프트웨어와 물리적 제약으로 함께 연결하여, 로봇이 임의의 위치로 이동하지 못하도록 제어하는 방식이 흥미롭게 느껴졌습니다. 이런 흐름을 보다 보니, 머지않아 집 안에서 휴머노이드 로봇이 간단한 집안일을 대신해 주는 모습을 실제로 보게 된다면 꽤 재미있겠다는 생각도 들었습니다.
3. 인공지능
이번에 연구실에서 6개월동안 여러가지 내용들을 보면서 생각보다 로봇에 인공지능을 적용을 한다는 것이 어렵다는 것이 느껴졌습니다.(저도 로봇 조종이 쉬운줄 알았어요……) 특히 현실 세계를 인공지능이 이해하고 이에 대한 판단을 하거나 행동을 해내는 과정에서 생각보다 복잡한 구조가 들어간다는 것이 생각이 되었고, 옆에서 예은 누나와 우진님, 태주님, 영규님이 로봇 데이터를 열심히 모으시는 것을 보고 로봇 데이터의 부족함, 그리고 이에 들어가는 자원이 생각보다 많이 들어간다는 것을 절실하게 느끼게 되었습니다.
그리고 로봇이 동작하는 환경에서 로봇이 상호작용하는 것들이 어떻게 동작할지에 대한 예측, 그리고 어떤 순서로 task를 수행해야 하는지, 어떤 것에 포커싱을 해야 될지 등등 아직까지는 로봇이 현실에서 직접 동작을 하면서 사람이 시키는대로 하기에는 조금 혈압이 오르더라도 기다려야 되지 않나…라는 생각이 들었습니다. 특히 아직까지는 로봇이 환경과 이에 대한 물리적 변수들은 파악을 하고 있지 못하고, 섬세한 조작을 하기에는 많은 제약 조건이 필요하다는 생각이 들어서 물리적 환경에 대한 강건한 생각을 가지고 있는 인공지능을 어떻게 만들지, 로봇에게 정확한 움직임은 어떻게 제공할 수 있을 지 생각을 하면서 사람이 어떻게 환경에 대한 이해를 하고 움직이는지 좀 더 찾아봐야 겠다는 생각을 하였습니다.
마지막으로 최근에 world model을 사용하는 nvidia의 GROOT Dream을 보았는데 로봇이 생성된 영상들을 기반으로 학습을 하고 실제로 동작하는 모습을 보고 사람도 저렇게 생각을 해서 다양한 동작을 만들어낼 수 있나? 저런 방식 말고도 로봇 데이터 증강과 이를 뒷받침해서 명확한 움직임을 제공해줄 인공지능 모델들이 계속 나올까? 라는 생각이 들게 되었습니다. 내년에는 이 부분에 대해서 추가적으로 공부를 해보아야 겠다는 다짐도 들었습니다.
연구실 라이프~
한 학기동안 연구실에서 공부를 하면서 느낀 점 중에 가장 크다고 느낀 것은 제가 무엇을 모르는지 확실히 알 수 있었던 것 같습니다. 스스로 공부를 하다보면 제가 공부를 하고 있는 부분이 맞는 내용인지, 어떤 방향으로 로드맵을 그리고 어떤 트랜드에 맞추어서 어떤 부분을 확실히 하면 좋을지 생각을 하는 것이 사실상 불가능에 가깝다고 느껴집니다. 그래서 이번에 연구실을 들어오면서 실제로 로봇을 다루어도 보고, 제가 하고 싶은 것도 해보고, 논문도 어떤 논문이 트랜드이고 어떻게 읽어야 하는지, 제가 알고 넘어가야 할 부분은 무엇인지 이런 부분들을 저희 팀 분들이 자세히 지도해 주신 것 같아서 진짜 많은 도움이 되었던 것 같습니다.

올해 제가 했던 것들을 크게 정리를 해보자면
- 로봇 데이터 수집 장치 개발(?)
- 데이터 수집 도우미
- 3D 프린터, 3D 설계 담당
- 기초 교육
- thor 초기 설정
정도가 있었던 것 같습니다.
별로 한 게 없는 것 같은데도 생각보다 다양한 것들을 한 것 같아서 좀 뿌듯하기도 합니다.

로봇 데이터 수집 장치 개발
UMI라는 논문이 저희 로보틱스팀에서 한동안 목표로 해서 진행된 적이 있습니다. 그러면서 저는 realsense와 같은 6d pose를 추출할 수 있는 vision 센서를 활용해서 umi에 실시간 피드백을 목표로 하는 장치를 만들어보는 역할을 맡게 되었습니다. 이전까지는 IK를 실시간으로 계산을 해서 제공해주는 프로그램이 없었는데 pyroki라는 것이 라는 것에 대한 태주님의 설명을 듣고 이를 적용해서 실시간으로 카메라의 6d 포즈를 활용해 화면상으로 로봇을 조작하는 피드백을 제공하는 프로그램을 만들어보았습니다.
그러면서 저는 학술제를 준비하게 되었고, 학술제에 위에서 설명한 장치를 개선해서 들고 나가고 싶다는 생각을 하였습니다. 그러면서 자연스럽게 장치의 접근성에 대해서 고민을 하게 되었고, 주변에서 가장 구하기 쉽고 튜닝도 잘 되어 있는 장치인 스마트폰을 활용해서 실시간으로 Haptic 반응까지 제공해보자 라는 생각을 하여 “Mobile UMI” 를 제작해서 실제 로봇까지 구동할 수 있도록 하였습니다. 예상보다 연구실분들의 반응도 좋았고, 학술제에 들고 나가서도 평가가 좋아서 운좋게 우승을 할 수 있었고, 앞으로 이 장치를 개선을 해서 실제로 로봇 데이터를 수집해보고 싶다는 생각이 들었습니다.
데이터 수집 도우미
올해 영규님이 로봇 데이터를 수집하시는 것을 보고 옆에서 도와 드렸습니다. 단순한 테스크임에도 불구하고 1시간동안 로봇 데이터를 수집을 하는 것을 보고 생각보다 데이터 수집을 하는 teleoperation이 쉽지 않구나 하는 것을 간접적으로 느꼈습니다. 곰곰히 생각을 해보면 이미지나 텍스트 영상은 인터넷에 활성화가 되어 있는데 로봇 데이터는 엄청난 규모로 활성화가 되어 있지도 않고, 로봇마다 센서의 위치나 종류, 환경이 다르기 때문에 이에 맞춰서 별도의 데이터를 준비해야 된다는 점에서 아무래도 한계가 있을 수 밖에 없다 라고 생각하게 된 것 같습니다. 그래서 내년에는 Cosmos와 같은 World model을 이해하면서 로봇에게도 데이터 증강을 쉽게 할 수 있는 방안에 대해서 생각해보고 싶습니다.
3D 프린팅, 3D 설계 담당
올해 연구실에 로봇 프레임 출력을 위해서 3D 프린터가 생겼습니다. 예전부터 저는 3D 프린트를 가지고 있어서 3D 프린팅 하는 법을 직접 공유하고 (가이드 파일까지 만들었어요!) 직접 필요한 부품을 설계해서 프린팅하는 단계까지 진행했습니다. 특히 3D 설계를 할 수 있다는 것은 원하는 카메라에 맞춰져 있는 프레임 설계나 로봇에 부족한 부품들을 추가로 설계해서 출력할 수 있기 때문에 저한테는 매우 큰 도움이 되었습니다. 그래서 UR5e의 카메라 프레임도 설계 하고 최근에는 so101 로봇의 베이스 프레임 개선판도 설계하면서 즐겁게 가지고 놀았습니다.
기초 교육
기초 교육에서는 카메라, 그리고 robot learning에 대해서 공부했는데 아직 학부 공부를 끝내지 않은 저에게는 좀 어려운 부분도 있기도 했고, 특히 21학점이라는 시간표를 들으면서 추가적으로 공부해야 되는 부분까지 알아가야 하다보니 좀 어려우면서도 부족한 점이 많다고 느꼈습니다. 그래도 옆에 있는 형 누나와 로보틱스 멘토님들이 부족한 부분은 세미나를 통해 조언해주셔서 덕분에 많은 것들을 알게 된 것 같고, 앞으로 제가 하고 싶은 분야에 대해서도 방향성을 잡을 수 있는 기회였습니다.
Thor 설정
저는 우분투 설정 하는게 재밌어서 제 노트북에서 듀얼 부팅해서 가지고 놀고는 합니다. 이번에 추가로 생긴 thor에 초기 설정을 하면서 “토르”와 “로키”라는 이름도 붙여주고 우분투 세팅, Thor의 arm 기반 구조에 대해서도 공부하면서 제가 기존에 경험할 수 없던 새로운 경험을 하였다고 생각합니다. 특히 thor의 독립적인 cuda 구조때문에 제약도 많고, 어렵긴 했지만, 하고 나니 뿌듯한 기분이 들었습니다.
그리고 연구실 생활과 대학 생활을 하면서, 고등학교 때와 가장 크게 다르게 느껴졌고 처음에는 적응이 잘 안 되었던 부분은 아무래도 나이였습니다. 고등학교에서는 선배라고 해도 많아야 두 살 차이 정도였는데, 대학교에 오니 같은 학번임에도 불구하고 나이 차이가 꽤 나는 경우도 있었고, 군대를 다녀오신 선배들도 계셔서 생각보다 형, 누나들과 함께 연구실 생활을 하는 것에 대해 걱정도 많이 했던 것 같습니다.

그럼에도 불구하고 형, 누나들이랑 밥도 같이 먹고, 이런저런 이야기도 나누고, (옆에서 훈수도 열심히 두고ㅎㅎ) 하다 보니 자연스럽게 친해질 수 있어서 정말 좋았습니다. 특히 저희 로보틱스 분들이 제가 하고 싶어 하는 것, 공부하는 방향, 그리고 현실적인 인생 조언(?)까지 잘 챙겨주셔서 덕분에 한 학기 동안 즐겁게 연구실 생활을 할 수 있었던 것 같습니다~

그리고 같은 방은 아니더라도 다른 팀원분들께서도 제가 놀러 가면 항상 반겨주시고, 학술제에 나갈 때도 직접 세미나에 들어와 평가해 주셔서 정말 감사했습니다. 마지막으로, 어린 나이에 연구실에 들어왔음에도 불구하고 관심 있게 지켜봐 주시고 신경도 많이 써주신 교수님께도 이 자리를 빌려 간략하게나마 감사 인사를 드리고 싶습니다^^

그리고 제 사생활에 대해서도 간단하게 이야기해 보자면, 가끔씩 제가 평소에 뭐 하고 노는지, 혹시 코딩만 하면서 지내는 건 아닌지 물어보시는 분들이 계셔서 답을 드리자면, 저는 혼자서 노는 걸 다 좋아하는 편입니다. 그래서 주말만 되면 혼자 서울 곳곳을 돌아다니면서 사진도 찍고, 구경도 하고, 맛있는 것도 먹으러 다니곤 합니다. 학교 근처에서도 종종 사진을 찍으면서 돌아다니는데, 아래에는 올해 제가 찍은 사진 2 장을 자랑할 겸 올려봅니다~


찐찐찐 마지막으로, 제 취미 하나만 더 소개드리고 마무리하겠습니다. 저는 노래 듣는 걸 정말 좋아해서, 집에서도 항상 노래를 틀어놓고 지낼 정도로 자주 듣는 편입니다. 그래서 올해 노래를 재생한 시간도 약 10만 분 정도로, 정말 다양하고 많은 곡들을 들었습니다.
특히 J-pop이나 인디 가수들의 노래를 정말 좋아해서, 추천해 주시면 감사히 들을 정도로 새로운 음악을 접하는 것도 좋아합니다. 그래서 마지막으로, 올해 들었던 노래 중에서 연구실 분들께 특히 추천드리고 싶은 곡 하나만 소개하면서 마무리하겠습니다.
마무리
대학교 입학을 시작으로 MT, 동아리 활동, 여행, 연구실 생활까지, 정말 많은 경험을 할 수 있었던 한 해였던 것 같습니다. 돌아보면 올 한 해를 정말 잘 즐겼다는 생각이 들고, 다양한 경험을 하면서 대학교 1학년을 의미 있게 보낸 것 같아 스스로도 만족스럽습니다.
며칠 뒤면 성인이 되는데 성인이 되는 기분이 알쏭달송하면서도 즐거운 것 같아서 내년의 연구실 생활, 학교 생활도 기대가 됩니다!

X-Diary를 처음 써보는 거라 블로그처럼 조금 길게 제 이야기를 풀고 중구난방하게 제가 하고 싶은 이야기, 크게 중요하지 않은 이야기를 한 것 같은데, 끝까지 읽어주신 분들께 진심으로 감사드립니다. 다가오는 2026년도도 모두 즐겁게 맞이하셨으면 좋겠고, 앞으로도 잘 부탁드립니다~김기현이었습니다
