안녕하세요. 이번 주는 X-Diary로 KRoC 2025 포스터 발표 및 참관 후기글을 작성해보고자 합니다. 이번 KRoC 2025는 평창 알펜시아 리조트에서 이루어졌고 학술대회 전체 기간은 25/02/12(수) ~ 25/02/15(토) 였으나 저의 경우에는 12일~13일로 수,목 동안 태주님, 영규형과 함께 다녀오게 되었습니다. 저의 포스터 발표는 목요일 오전 10시 반인 이른 시간이었기도 하고, 금요일에는 졸업식이 있었던지라 금요일 일정까진 다 경험을 하진 못했습니다. 사실 저희 로보틱스 팀 입장에선 금요일 발표 세션들이 너무나도 align이 잘 맞는 robot learning과 관련된 맛도리 세션들이라 들어야만 했는데, 못 본게 너무너무 아쉽네요. 차라리 졸업식을 포기하고 목,금으로 가서 들을 걸이라는 생각을 많이 했었습니다. (근데 또 졸업식 때 막상 대학생활동안 함께한 동기들이랑 사진찍고 그러고나니 한번 뿐인 학사 졸업식은 또 기념하는 게 맞았구나 싶기도 하네요.)
서베이 논문 작성기
우선 서베이 논문 작성기를 먼저 말씀드리겠습니다.
이걸 얘기하려면 24-2학기 인공지능학과의 패턴인식 수업에 대해서 언급을 하고 넘어가야겠네요. 해당 수업은 사실 제가 23-2학기에 한번 들었던 수업을 재수강하는 거였는데, cost가 상당히 많이 드는 굉장히 고난이도 수업입니다. 전반적으로 연구 논문 형식의 텀프로젝트로써 수업이 굴러가는데, 수업교수님께서 원하시는 텀프로젝트의 수준은 일반 학부생의 그 귀염뽀짝한 텀프로젝트 수준이라기보단, 연구를 많이 경험해 본 학부연구생이나 심지어는 석사급에게서 기대할 수 있는 문제정의와 분석 및 논리를 요구하시는 정도였습니다. 재수강 이전에도, 재수강 중에도 정말 힘들게 진행했던 기억이 납니다.
저의 경우에는 프로젝트 주제를 저희 로보틱스 팀의 LLM 과제의 전반적인 흐름에서 많이 도움을 받아 “로봇 매니퓰레이터의 액션 성능 향상을 위한 프롬프트 개선”으로써 정의하고, 수업 중반부 쯤 이에 대한 서베이 논문을 먼저 중간과제로써 제출해야 했었습니다. 그러다보니 자연스레 CoT(Chain-of-Thought)나 PoT(Program-of-Thought) 등의 LLM Prompting 기법을 기반으로 한 서베이가 필요했고, LLM Prompting 기법에서 더 나아가 LLM Code Generation 능력을 활용한 로봇 매니퓰레이션 제어 정책에 관한 서베이도 함께 해나가기 시작했습니다. 그렇게 어찌저찌 패턴인식 중간과제를 제출했는데, 서베이 소스들과 프로젝트 주제가 학부 수업용으로만 남는 것이 아쉬워서 이를 좀 더 다듬어서 KRoC 2025에 제출해보는 것을 추가 목표로 삼게 되었습니다. 그래서 해당 과제 자료를 초안으로 삼고, 전체적인 스토리를 로봇 액션 코드 정책 생성과 관련된 방향으로 개선을 해나가게 되었습니다.
이 과정에서 서베이 방식에 있어서는 주연님의 도움을 많이 받았고, 전반적인 스토리라인과 세세한 핵심 키워드 및 워딩들을 잡는 데 있어서는 태주님에게 정말 많은 도움을 받았던 것 같습니다. 사실 저는 큰 그림을 그리는 데 익숙치 않아 LLM Prompting에만 근시안적으로 파고들어서, 초안에서 굉장히 스토리가 산으로 갔었던 기억이 있는데, 그럴 때마다 태주님께서 전반적인 핵심 스토리를 다시금 깔끔하게 잡아주셨던 기억이 납니다. 아마 태주님 도움이 없었다면 제출마감기한까지 깔끔히 정리된 스토리로는 제출을 못했을 가능성이 큽니다..
포스터 준비
포스터 준비,, 제가 굉장히 안일하게 생각하고 준비가 차일피일 늦어졌었는데요. URP 멘토로서의 준비와 IJCAS 논문 준비, 이외 개인적인 사정이 여러가지 겹쳐 멘탈이 반쯤 나간 상태로 연구실에 출퇴근하고 있었습니다. 결국 학회 가기 일주일전에서부터 학회가기 전날까지 부랴부랴 포스터 스토리 잡고, PPT 준비하고, 포스터에 들어갈 논문 내용 숙지하고, 발표 준비하고 반복했던 것 같습니다. 정말 준비가 안 되어 있던지라, 저희 로보틱스 팀원분들이 계속해서 많이 도움주셨습니다. 마치 한 마을에 아기가 태어나면 그 아기가 커나가는 시간 동안 마을전체가 키운다는 말처럼, 제 포스터 준비와 논문 내용 숙지, 발표 준비에 있어서 모든 팀원분들이 붙어서 도와주셨습니다. 이게 다 제가 준비가 덜 되어 부족했던 탓인데,, 다들 바쁘신데 염치불구하고 도움을 받았기 때문에 제가 촉박한 시간 속에서도 나름 잘 준비를 해나간 것 같습니다.
근데 사실 이 포스터를 준비하는 과정에서, 제가 이미 제출했던 논문의 방법론들을 분류하는 기준이 생각보다 잘못 잡혔다를 인식하게 되었습니다. 이 때문에 이미 분류 기준이 모호한 부분에 대해서 어떻게 남들에게 혼동을 주지 않고 내용을 잘 전달하지에 대한 걱정이 계속 생겨버렸는데, 이 부분도 태주님이 발표 스토리라인 잡는데 있어 많은 도움 주셨습니다. 그래서 학회가기 전날까지도 서베이 논문에 실었던 방법론들에 대해 제가 완벽한 인지가 덜 되어있단 생각에 계속 초조하고 불안했는데, 팀원분들 도움으로 하나하나 논문에 대한 간단한 세미나를 통해 발표내용에 있어 빈틈이 생기지 않게 많은 도움 주시고, 오해할 수 있는 워딩이나 과한 TMI 를 뱉는 발표에 대해서는 교정해주시기도 하였습니다. 계속해서 제가 발표할 내용을 말하고 생각하고 정리하고 다시 말하고를 반복하다보니, 이제는 어느정도 발표의 큰 흐름에 윤곽도 조금 잡힌 것 같다란 생각이 들게 되었습니다.
포스터 발표
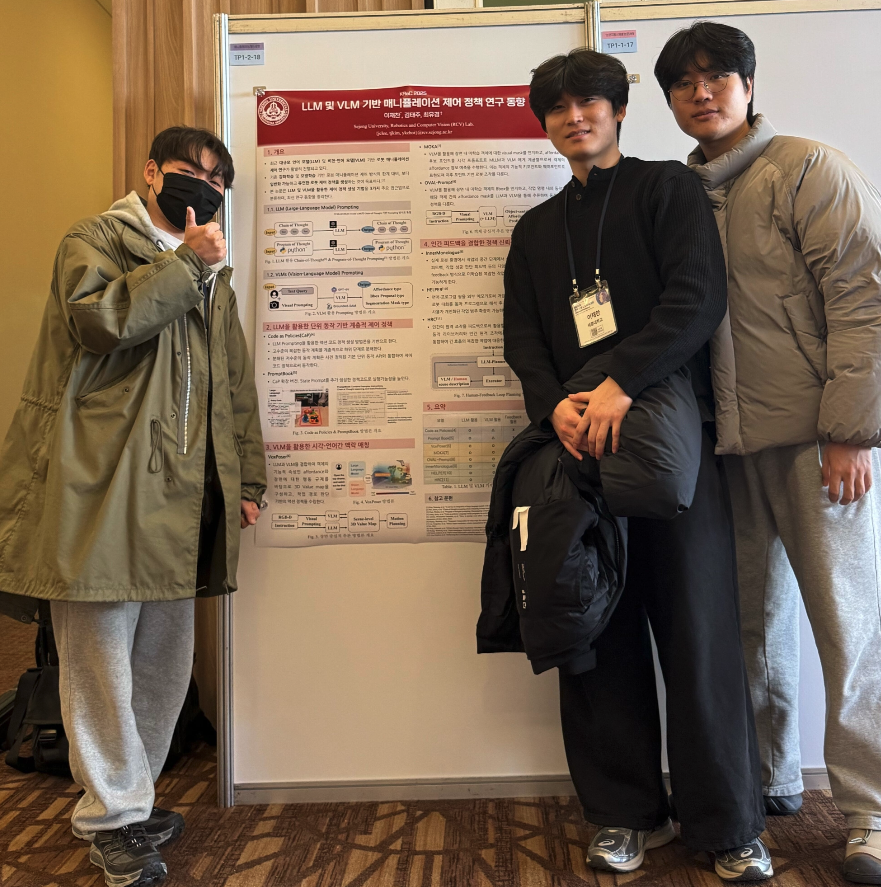
발표 전날까지 숙소에서 발표 스크립트를 짠 걸 토대로 포스터 펼쳐놓고 중얼중얼도 해보고, 태주님께 마지막까지 피드백 열심히 받고, 영규형과도 질의응답 많이 해보면서 나름대로 예방주사를 잘 맞아 놓은 덕분인지, 발표 당일 포스터 걸러 가며 긴장되는 마음 속에서도 평정심이 잘 유지된 것 같습니다.
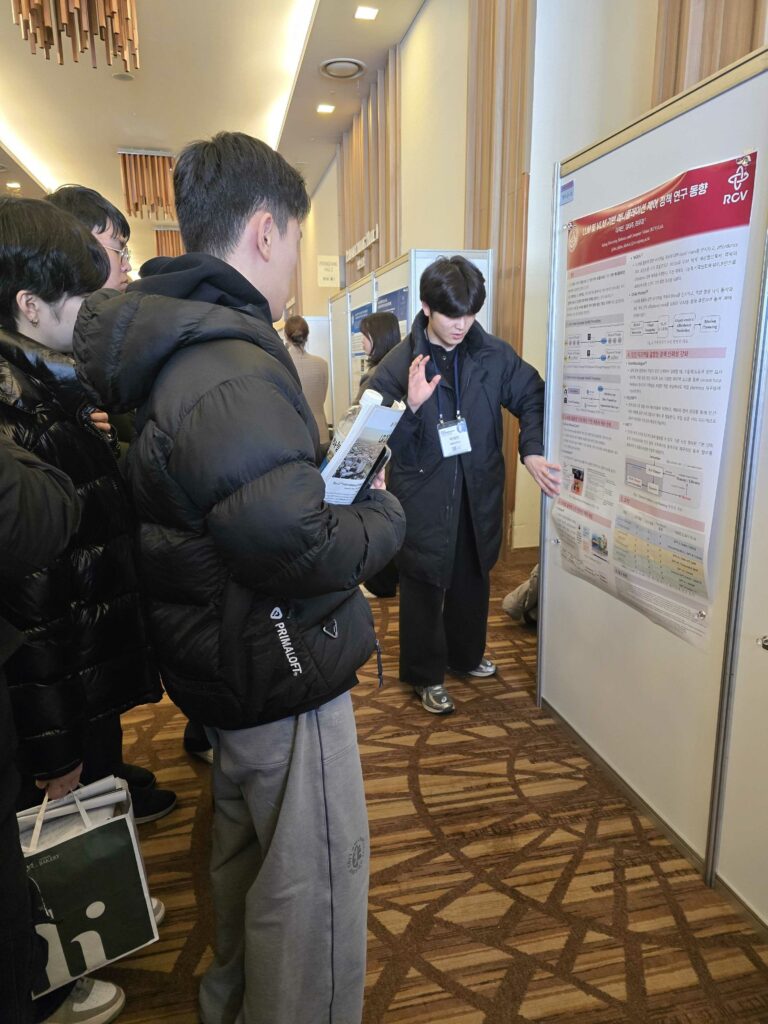
저의 경우 딱 발표시간 5분 전에 맞춰 포스터 걸러왔는데, 막 포스터 걸자마자 사람들이 하나둘 오시기 시작했습니다. 사람들이 포스터를 유심히 보고 생각하고 계시는 걸 보면서 언제쯤 질문해주실까 생각이 들었습니다. 처음 한 5분은 제가 먼저 설명해드릴까요? 라고 내뱉지 못하고, 그냥 포스터 슥 보고 ‘흠 이렇구나~’하고 그냥 가버리는 거 아니야? 란 생각에 좀 긴장하고 있었는데, 마침 어떤 한 분이 슥 오셔서 친절하게 한번만 설명해주세요 라고 먼저 말씀해주셔서 준비해왔던 첫 발표를 자연스럽게 할 수 있었습니다. 첫 발표는 긴장이 많이 됐는지 말하는 데 조금 숨차기도 하고 살짝 업된 상태로 어조가 중구난방이었던 것 같은데, 이건 사람들이 끊임없이 찾아오고 전체 설명을 계속해서 3번4번 하다보니 조금씩 익숙해지게 된 것 같습니다. 그러다보니 사람들이랑 대화하는 게 조금씩 재밌어지기 시작했습니다. 이 사람은 어떤 생각으로 내 포스터를 보고있을까? 아 역시 이 부분을 다들 궁금해 하는구나. 이 부분엔 조금 더 설명이 필요한거구나. 이런 건 굳이 설명안해도 다들 알아먹는구나. 등등의 생각들이 들다보니 말도 조금씩 유동적으로 잘 정리되어 갔던 것 같네요.
특히 기억에 남는 질문을 해주신 건 한 3분 정도 있었습니다. 첫번째는 경력이 꽤 있어보이시는 LG전자의 남자 연구원분이셨는데, 영어 발음이 굉장히 좋으셔서 기억에 남습니다. 이 분은 주로 low-level 로봇 제어기통을 연구하시는 분이라고 해주셨습니다. 핵심 질문은 LLM이 Code Generation으로 생성한 action 코드 정책은 compile은 어떻게 하는 거냐? 어떻게 low-level 단까지 잘 동작할 수 있게되느냐? 와 같은 액션 정책에서 code generation 후의 동작과정 자체를 여쭤보셨습니다. 저 같은 경우는 논문들을 정리한 결과, python script와 사전정의된 라이브러리, 혹은 사전정의된 low-level action 함수만으로도 충분히 code generation만 된다면 로봇이 실제 환경에서 동작이 가능한 것으로 확인된다라고 말씀드렸습니다. 그러자 그럼 나중에 c++이나 이런 low-level 언어로 compile은 어떻게 하는거냐며, python script가 code generation 되는 것만으로도 로봇이 동작되는 게 맞는지 한 2번 더 여쭤보셔서 기억에 남습니다. 가실 때는 요즘 핫한 연구를 서베이로 잘 정리해주셨다며 포스터 사진을 찍고 가셨습니다.
두번째는 저랑 비슷한 또래의 자율주행 visual SLAM을 연구하신다는 남자 학생연구원분이셨는데, VLM을 활용한 Visual Prompting에 있어서 자율주행 SLAM쪽에도 이를 적용할 수 있을지의 관점으로 굉장히 많은 관심을 가지고 질문을 해주셨습니다. 처음엔 저도 좀 함축적인 내용으로만 간단히 설명을 드리다가, 점점 더 질문을 많이 해주셔서 저도 신나가지고 논문의 자세한 내용, OVD내용, 그리고 제가 패턴인식 때 써먹었던 prompting 방식도 한마디 설명드리며 되게 재밌게 대화했던 것 같습니다. 이 분도 마찬가지로 포스터 사진을 찍고 가셨습니다.
세번째는 ETRI에서 오신 여자 연구원분이셨습니다. 이 분은 태주님께 질문해주시던 분이셨는데, 강화학습인가 모방학습인가로 로봇이 파지하기 힘든 아주 얇은 철사 등의 물체를 잡을 수 있게 만드는 파지연구를 하고 계신다고 들었습니다. 너무 경청 잘해주시고 표정에서부터 리액션이 너무 좋으셔서, 옆에서 듣고있다보니 관심을 가져주신다는 게 너무 기분이 좋았습니다. 이것들 최신논문이냐, 나중에 본인 연구에 해당 서베이에 언급된 논문들 다시 참고해서 봐보고 싶다고 하시며, 사진을 연신 찍어가주셔서 이것도 너무 감사했습니다.
이외에도 한 3명정도가 더 크고 작은 질문을 해주신 것 같고, 대충 눈대중으로만 봤을 땐 10~20명정도가 포스터를 읽어보고 가신 것 같아서 기분이 뿌듯했습니다. 10시반~11시반까지 원래 1시간 발표를 약 1시간 10분 15분까지 남아서 대화하다가 조금 늦게 점심식사하러 가게 됐는데도 기분이 좋았습니다. 첫 발표를 태주님과 영규형의 큰 도움으로 무탈히 마치니 그제서야 긴장이 확 풀려서 점심 먹으면서 피로가 몰려왔던 기억이 있네요.
기타 학술대회 내 경험..
우선 이번에 세종대 강병현 교수님 연구실 측에서도 똑같이 KRoC 참관을 했었습니다. 그 중 RED Show라는 실제 로봇 시연과 함께 포스터 발표를 진행하는 세션에 저랑 같은 과 동기가 있었어서, 같은 학회에 온 것이 반갑기도 하고, 많은 사람들앞에서 발표도 잘하는 게 뭔가 자극도 되더라구요. 나중에 이 친구가 RED Show 우수상 받은 소식을 알게 되었는데, 쟁쟁한 학교들 사이에 세종대가 있으니 좀 멋있었습니다. 저도 추후에 저렇게 학회에서 자리를 빛낼 수 있는 사람이 되어보고 싶다는 그런 마음이 들었던 것 같습니다.
또 다른 상황은 저희 로보틱스팀 LLM 과제에 참여하는 한양대 에리카 연구실 실무연구원분들과의 즉석 만남이었는데요. 리조트 내 카페에서 만나서 한 1~2시간? 정도 얘기를 나눴던 것 같은데, 이번에 또 과제에 대한 서로의 관점과 생각이 달랐다는 거를 알 수 있었습니다. 태주님을 중심으로 대화를 통해 서로 간의 의견이 조율이 되는 것 같긴 했는데, 저는 여기서 무언가 많은 것을 그 분들께 여쭤보지 못했던 것이 좀 아쉬웠습니다. 제가 세종대나 저희 연구실의 입장을 대변하는 것이 아니기 때문에 말조심해야지만 생각하다가 별말 못하고, 그 쪽 연구실에서 활용하고자 하는 방법론에 대한 질문만 몇개 하고 끝난 것 같습니다..ㅎㅎ.. 다음에 제가 과제 관련해서 협의나 대화가 오갈 일이 또 생기면 그 때는 과제에 대한 더 깊은 이해를 바탕으로 실무연구원분들과 자연스러운 과제 관련 대화가 이루어질 수 있길 바라봅니다.
마지막은 기타 포스터 세션들 돌아다니며 질문하면서 느낀 점인데요. 일단 저희가 머물렀던 날의 포스터 세션들은 크게 3부류로 나뉘었습니다. 자율주행/매니퓰레이션 제어/computer vision 였는데, 해당 분야 중에서 저희 팀이 하고자하는 로봇 연구와 align이 맞는 최신 연구를 하고있는 데가 있나? 하고 주욱 살펴봤는데, LLM을 추론에 조금 활용하거나, LLM Prompting을 조금 하거나, VLM을 조금 손대거나, RAG를 붙이거나 하는 등의 논문들은 있었으나 LLM Code Generation 을 이용한 매니퓰레이션 제어와 관련된 연구는 거의 하나도 없었던 것이 좀 놀라웠습니다. 물론 RED Show를 진행했던 팀 중 숙명여대 한팀이 직접 매니퓰레이터 들고와서 실험용 스포이드를 LLM기반 데이터처리와 실시간 좌표 추출을 통해 자동으로 분주하는 시연을 보였는데, 저자에게 직접 가서 여쭤보니 하드코딩 기반의 LLM Prompting이었던 거로 확인되었습니다. LLM Reasoning을 활용한 Code Generation까지 어떻게 더 잘할거냐는 고려없이 단순 LLM prompting으로 코드 만들고 다시 그걸 LLM 에 넣어서 동작가능한 코드로 바꿔달라하고, 이걸 2,3번만 반복해도 동작가능한(?) 코드로 바꿔주었다고 하네요…..(?), 납득이 잘 안 갔지만,, 하드코딩인가보다 하고 넘어갔습니다. 아무튼 저희 연구분야가 생각보다 매우 경쟁력있고 가치있는 분야라는 생각이 또 들어 돌아가면 베이스라인에 매우매우 집중을 해서 기반을 빨리 만들어야겠다고 다짐을 했습니다.
더구나 좀 놀란 점은, 국내학술대회이다 보니, 몇몇 논문이나 포스터들은 저자들이 자리에 없는 경우도 있거나, 전반적인 흐름에 대해 이해한 것이 맞느냐라는 질문을 제가 드렸는데, 전혀 딴 말을 하시는 등 아쉬운 모습들도 많이 보였습니다. 그 외에는 너무도 신기하고 훌륭한 연구를 진행해주시는 분들도 몇몇 계셨고, 질문을 드리면 너무나도 친절히 답변해주시고 저랑 질의응답 티키타카가 잘 되시는 연구원분들이 많아서 좋았습니다.
마치며
좋은 기회 제공해주신 저희 지도교수님과, 큰 방향성부터 세세한 피드백까지 옆에서 가장 많은 도움주신 태주님, 같이 숙소에서 발표전날까지 발표준비하는 거 도와준 영규형, 출발전날까지 도와주신 저희 로보틱스 팀원분들 감사합니다.
앞으로도 논문 제출 후 포스터 발표가 있을 때 이번보다 더 잘 준비해가서 저의 연구에 관심이 있는 다른 연구원분들이 많아질 수 있게 노력하고, 그 분들께 더 많은 연구적 인사이트를 잘 나눠줄 수 있는 연구원이 될 수 있도록 노력하겠습니다.