Introduction
convolution은 연산 방식이 일정 크기의 커널을 이미지에 windowing하면서 연산을 진행하기 때문에, local한 관계에 집중합니다. 그러다 보니 [ 그림1 ]과 같이 멀리 떨어진 픽셀은 좀 더 많은 레이어를 통과한 이후에나 관계를 파악할 수 있습니다. 이렇듯 멀리 떨어진 특징끼리는 그 사이의 관계를 파악하기 어려운 것을 long range dependency라고 합니다.
음성, 언어(텍스트)와 같이 데이터가 순서에 영향을 받는 시계열 데이터는 rnn모델을 주로 사용합니다. rnn에서 사용되는 회귀 연산은 이러한 long range dependency를 해결할 수 있습니다.
rnn은 recurrent 연산을 수행하는데, 시계열 데이터인 텍스트를 한 단어씩 순차적으로 입력합니다. 이때 하나의 문장을 입력하면 첫 단어인 what에는 레이어의 초기 가중치를 곱하고, 그 다음 단어인 time에는 이전 단어 ‘What’에 가중치 W를 곱함으로써 생성된 hidden state를 가중치로 사용합니다. 이처럼 한 번의 recurrent연산에서는 모든 입력 요소간의 연산을 진행하기 때문에 rnn은 long range dependency를 해결할 수 있습니다.
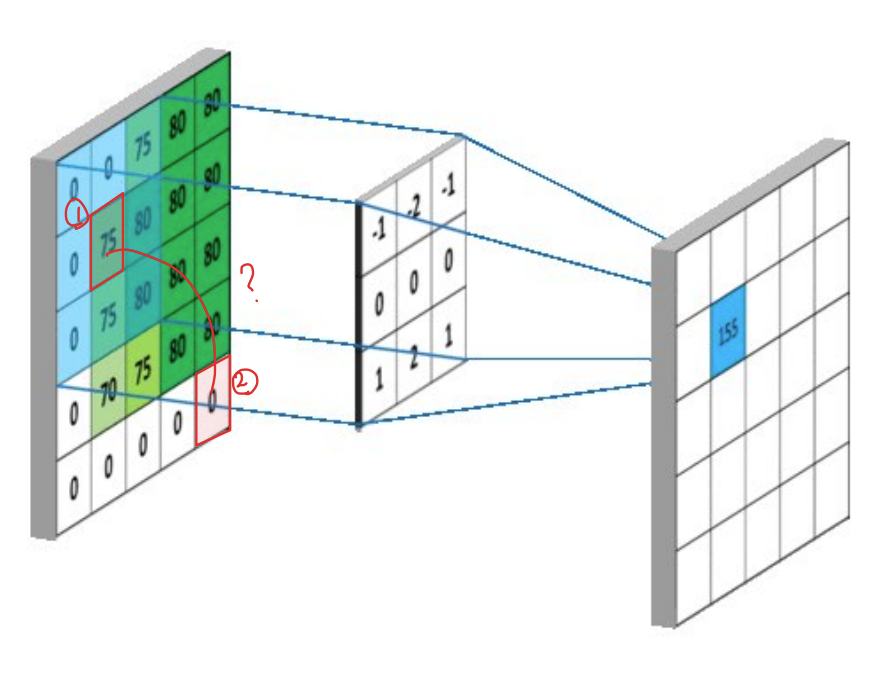
시계열 데이터가 아닌 이미지의 경우, 전체 이미지를 고려하기 위해, 즉, 넓은 receptive field를 갖기 위해 레이어를 깊게 쌓아 반복적인 convolution연산을 수행합니다. [ 그림 2 ]에서 볼 수 있듯 convolution을 수행하여 출력된 값은 이전 이미지에서 kernel size만큼의 영역을 고려한 값이라고 할 수 있습니다. 따라서 convolution연산을 많이 수행할수록, 출력된 특징값은 처음 입력된 이미지의 넓은 영역을 파악할 수 있습니다.
그러나 이러한 local 연산을 반복적으로 사용하면 연산 네트워크의 깊이가 증가하여 연산량 측면에서 비효율적입니다. 이러한 문제를 해결하고자, 본 논문에서는 반복적인 local 연산 적용 대신, self-attention방식의 non-local 연산을 적용하여 long range dependence를 해결하였습니다.
논문에서 제안하는 non-local 연산의 이점은 다음과 같습니다.
- local연산과 달리 두 위치간의 직접적인 연산을 수행하기 때문에 거리에 상관없이 모든 요소간의 관계를 파악
- 적은 수의 레이어로도 best result 달성
- 입력 변수의 크기를 유지하여 convolution과 같은 다른 연산과 함께 사용하기 좋음
논문에서 제안하는 Non-Local 연산은 영상 처리 기법 중 하나인 non-local means방식에서 영감을 받아 설계된 방법론으로 논문 방법론을 설명하기 앞서 non-local means filter의 개념을 살펴보고 넘어가겠습니다.
Non-Local Means
잡음이 포함된 이미지에서, 잡음을 제거하는 것을 image denoising이라 합니다. 이때 image denoising은 이미지에 여러 필터를 적용하는 것으로 진행되는데, 흔히 알고 있는 가우시안, 평균값 필터 등을 사용합니다.
Non-Local Means Filter는 노이즈 제거 필터의 하나로, 주로 speckle 형태의 랜덤 노이즈를 제거하는 데 사용됩니다.
랜덤 노이즈는 랜덤한 특성을 띄는 노이즈로, 영상을 촬영할 때마다 대상은 그대로 있지만, 조명 등의 요소에 의해 불규칙적으로 밝기가 다른 점이 발생하는 것을 의미합니다. 영상에서 랜덤 노이즈를 제거하기 위해 동일한 사진을 여러 장 촬영하고 촬영된 사진의 평균을 구하면 랜덤 노이즈를 제거한 영상을 구할 수 있습니다.
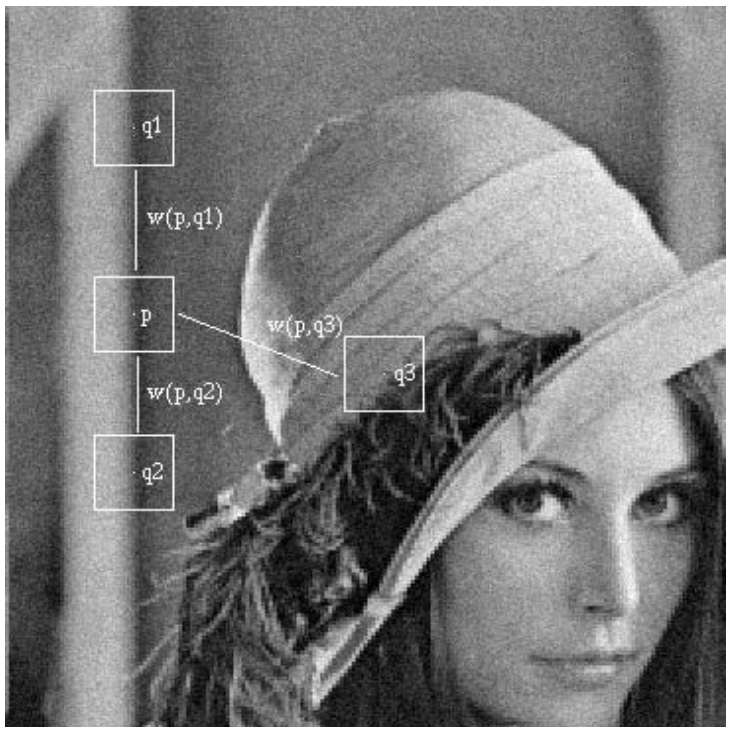
NLM Filter는 여러 장의 영상이 아닌 한 장의 영상만을 가지고 랜덤 노이즈를 제거하는 방법론입니다. [그림 2]를 보면, 한 장의 영상 안에 서로 유사한 영역들이 존재합니다. p 지점의 경우 q1, q2와 유사한 구조를 띄고 있어, 이러한 영역들을 모아 평균을 구한 것은 여러장의 영상을 평균해 준 것과와 유사한 결과를 얻을 수 있습니다. 이렇듯 전체 영상에서 일정 영역과 다른 영역간의 유사도를 구하고, 비슷한 영역끼리 평균 연산을 취하는 것을 Non-Local 연산이라 합니다.
Method
Non-Local Neural Nerworks
Non-Local Mean 연산은 영상의 전체를 탐색하여 영역 간의 유사도를 구한 후, 유사한 영역 끼리 평균 연산을 수행합니다. 이러한 non-local mean operation에 의해 논문의 generic non-local 연산은 [식(1)]과 같이 정의됩니다.

i는 출력 위치를 의미합니다. 이미지의 경우는 공간, 시계열 데이터의 경우에는 시간이 되겠죠. 그리고 j는 입력값에서 가능한 모든 위치의 인덱스를 나타냅니다. x는 이미지, 시계열, 비디오와 같은 입력 데이터 혹은 그 특징 벡터이고, y는 출력되는 특징 벡터입니다.
f는 x_i, x_y간의 simillarity를 계산하고, g는 입력 x에서 x_j의 a representation을 계산합니다. f(x_i, x_j)는 두 위치의 x_i, x_j의 similarity로, 논문에서는 두 입력 벡터의 채널축 dot product로 정의하였으며, 구체적인 정의는 [식(2)]와 같습니다.

각 요소가 의미하는 바를 파악하고 [ 식 1 ]을 다시 보면, y를 계산하는 부분이 x 내에 존재하는 모든 위치(\forall j)와의 관계를 가중합하는 연산임을 알 수 있습니다.
Non-Local Block
위의 Non-Local operation을 다른 구조에도 쉽게 접목하기 위해서, 저자는 [ 식 ]과 같은 Non-Local block을 제안하였습니다.

[ 식 3 ]에서 y는 앞서 [ 식 1 ]의 결과값이고, x는 residual connection을 의미합니다. residual connection에 의해 이미 학습된 모델 중간에도 non-local block을 끼워 넣을 수 있으며, 이러한 구조를 사용했을때 high-level, sub-sampled 특징 맵에서는 연산량의 향샹폭이 크지 않다고 합니다.
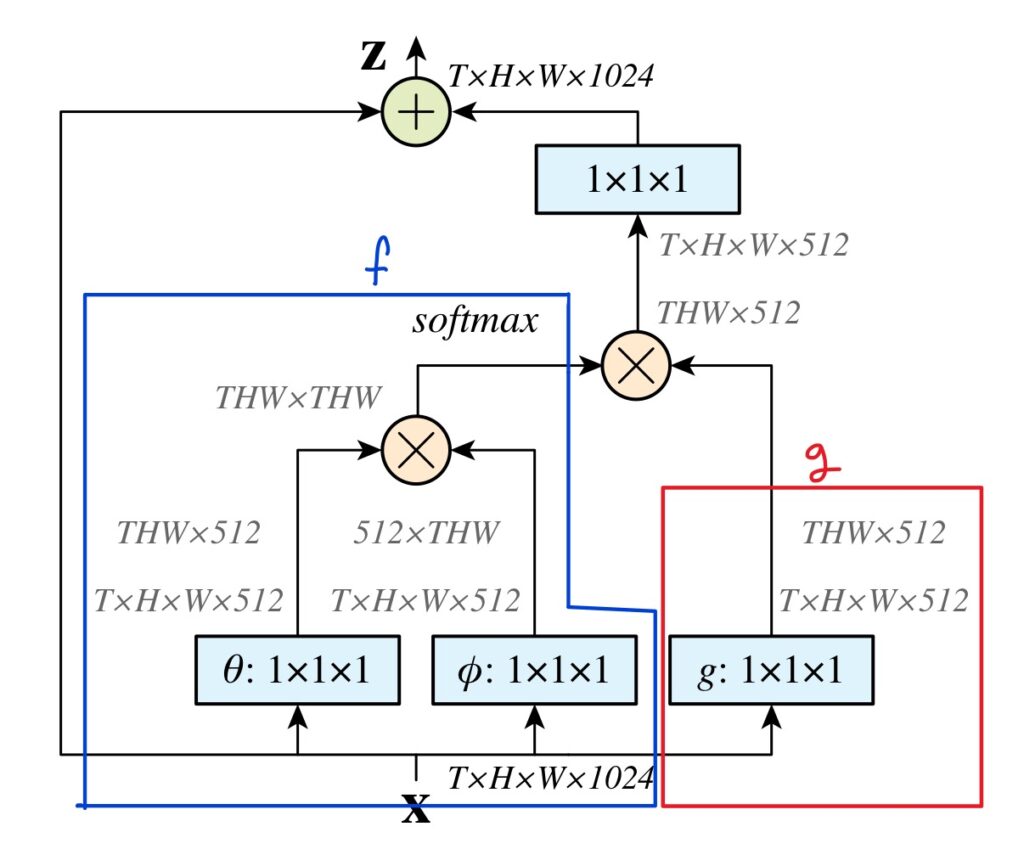
[ 그림 3 ]은 similarity function을 Embeded Gaussian으로 사용한 non-local block의 구조도입니다. 파란 색으로 표시된 부분이 f, 빨간 색으로 표시된 부분이 g이고, 1\times 1 \times 1이 작성된 블록들은 3D convolution입니다. [그림 3 ]에는 입력 벡터의 차원수가 4개로, 일반적인 이미지 데이터와 같이 H*W*C로 되어 있는 것이 아닌 T*H*W*C 형태로 되어 있는데, 이는 학습 데이터로 비디오를 사용하였기 때문입니다.
Experiments
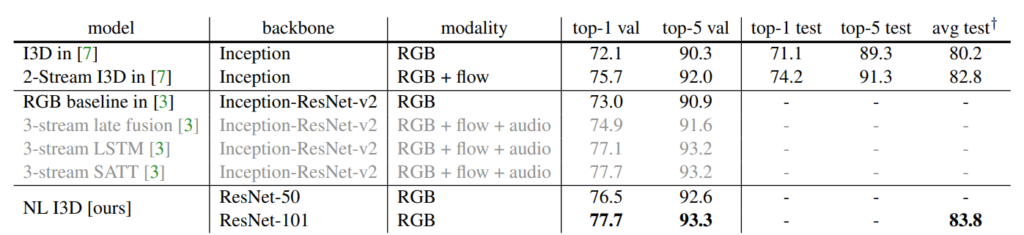
논문에서는 Kinetics dataset이라는 데이터셋을 이용하여 실험을 진행하였습니다. Kinetics dataset은 비디오 데이터셋으로, 24.6만개의 training data, 약 2만개의 test data로 구성되어 있으며, 각 비디오는 한 가지 동작과 연관되어 있어, 비디오를 보고 사람의 동작을 맞추는 classification task를 수행하였습니다.
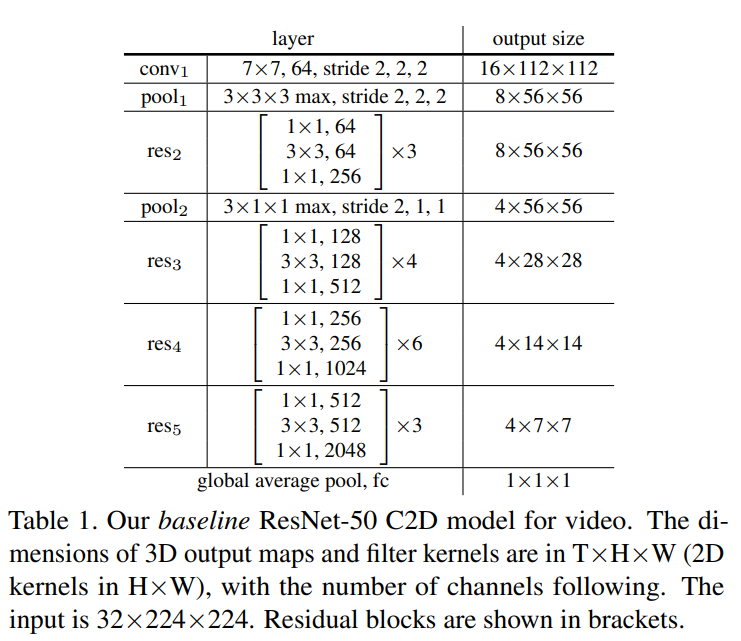
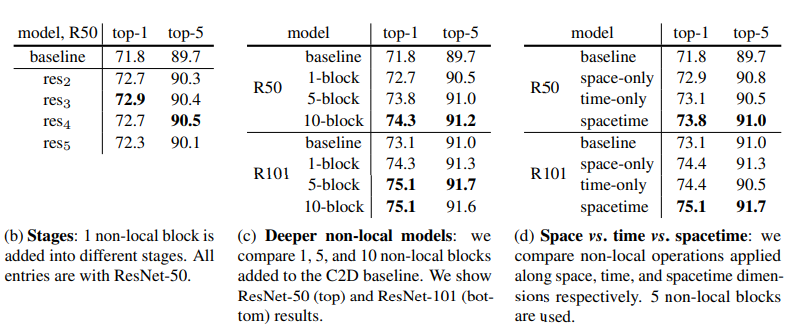
해당 실험에는 resnet-50을 베이스로하는 두 가지의 모델을 사용하였는데, 하나는 2D ConvNet baseline (C2D)모델로 우리가 흔히 알고 있는 ImageNet으로 pre-trained된 resnet모델에 [ 표 1 ]과 같이 time축을 포함하여 3*3*3, 3*1*1로 pooling을 수행하는 모델입니다.
다른 하나는 Inflated 3D ConvNet (I3D)모델로 C2D모델과 거의 동일하나 1*1, 3*3 convolution 대신 3*1*1, 3*3*3의 3D convolution을 사용하였습니다. 증가한 차원 만큼의 파라미터는 기존 C2D의 파라미터를 활용하였습니다.
리뷰 잘 봤습니다.
non-local block을 사용하면 high-level, sub-sampled 특징 맵에서 연산량의 향샹폭이 크지 않다고 하셨는데, 그 이유에 대해서 여쭤봐도 될까요??? low level 에서는 어떻게 되는건가요?
그리고, classification 말고 다른 task에 적용한 실험도 있는지 궁금합니다
non-local block을 low-level feature, 즉 모델의 처음 부분에 비해 연산량의 향상폭이 크지 않은 것으로 이해하였습니다.
video classification 이외에도 COCO데이터를 사용한 object detection, semantic segmentation 실험 성능이 리포팅되어 있습니다
안녕하세요. 리뷰 잘 봤습니다.
결국 Self-attention을 통해 CNN의 long range dependencies 문제를 해결하는 부분이 논문의 중점 내용이라고 해석했습니다. Self-attention 연산을 Transformer 방식이 아닌 NLM filter를 통해 나온 비슷한 영역에 대해 평균을 구하는데, 그 수식의 노테이션이 정확히 이해되지 않습니다. e, theta와 pi가 어떤 것을 의미하는지 설명해주실 수 있으실까요?
e는 상수이며, \theta (x) 와 \pi(x)는 각각 임베딩된 벡터를 의미하는데 그림 3에서 보시는 바와 같이 단순히 conv1*1*1레이어를 통과했음을 의미합니다.
안녕하세요 리뷰 잘 봤습니다.
[그림2]에서 “p 지점의 경우 q1, q2와 유사한 구조를 띄고 있어, 이러한 영역들을 모아 평균을 구한 것은 여러장의 영상을 평균해 준 것과와 유사한 결과를 얻을 수 있습니다.”라고 하셨는데, 사실 한 이미지에서 p지점이 q1과 q2와 유사한 구조를 띄고 있다는 것만으로 이것의 평균을 통해 여러장의 영상을 평균해준 것과 유사한 결과를 얻을 수 있는지 의문입니다. 비디오에서 NLM Filter를 사용할 때 갑작스럽게 이미지가 변하지 않는 다는 것을 가정하여 사용하는 걸까요?
여러 장의 이미지의 평군값을 통해 random noise에 해당하는 outlier를 제거하는 개념을 한 이미지에서 수행하는 것으로 보시면 되는데, 유사도가 매우 높은 영역끼리의 연산을 수행하는 경우, 동일한 이미지와의 연산을 수행하는 것과 비슷한 값을 도출하게 됩니다. 이 부분에 관해서는 원본 논문의 방법론 부분을 읽어 보시는 것을 추천드립니다.
넵 해당 데이터는 하나의 상황에서 하나의 동작만을 수행하는 것으로 갑작스럽게 다른 영상의 입력이 들어오지 않는 상황에서 실험이 수행되었습니다.