Introduction

3D data 의 종류로 위의 3가지가 가장 주로 이용이 된다고 합니다. 각 점들이 그래프 형태로 연결된 Mesh, volume + pixel 이라는 뜻으로 pixel 처럼 일정한 간격의 값이 3D 공간 상에 위치한 voxel, 그리고 각 점들의 집합인 point cloud 가 있다고 합니다. point cloud 는 중요한 geometric data structure 중 하나이지만 이는 irregular format 이라는 단점이 있었습니다. 이 irregular format 이라 하면 이미지의 pixel 처럼 일정한 간격으로 값을 갖고 있거나 그 값들의 순서가 명확하지 않고 그저 여러 points 의 set 이라는 의미입니다. 그렇기 때문에 이전 연구들에서는 이를 regular 3D voxel grids or collections of images 로 변형하여 이용하곤 했었습니다. 하지만 이렇게 만들어진 데이터는 불필요하게 방대해지고 그로 인해서 여러 문제들이 발생할 수 있습니다. 그렇기 때문에 이 논문에서는 point cloud data 를 가공하지 않고 직접적으로 이용할 수 있는 PointNet 을 제안하게 되었습니다. 이는 object classification, part segmentation, scene semantic parsing 등 여러 분야에 적용될 수 있으며 성능에도 효과적이고 robust 한 특성도 갖고 있다고 합니다.
Properties of Point Sets in Rn
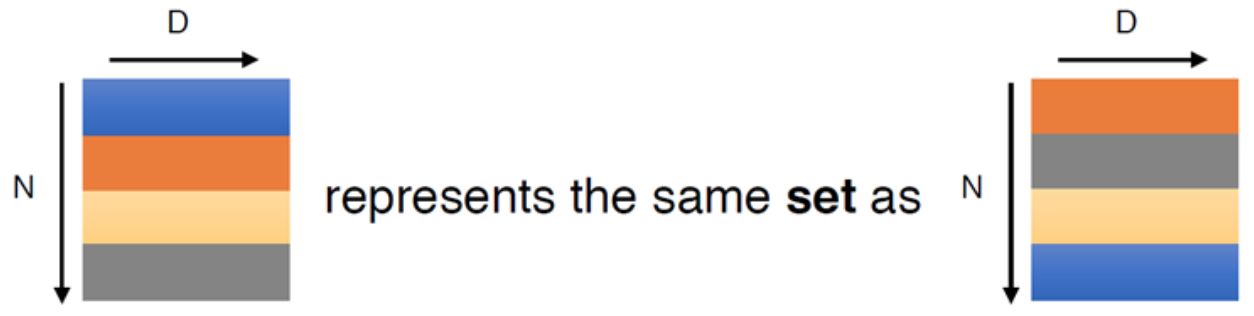
- Unordered. image 의 pixel 이나 volumetric grids 의 voxel 과 다르게 point clouds 는 특정한 순서가 없는 set of points 입니다. 그렇기 때문에 N 개의 3D point sets 을 사용하는 network 는 N! permutation 에 invariant 해야합니다. 즉, N 개의 point sets 이 있다면 이것은 N! 개의 순서가 발생할 수 있는데 어떠한 순서로 입력이 되더라도 그와 무관하게 같은 output 이 발생해야합니다.
- Interaction among points. 각 points 는 주변 points 와 함께 어떠한 의미, 지역적 특징을 갖을 수 있어야 합니다.
- Invariance under transformations. 모든 점들에게 rotating, traslating 등을 적용하였을 때 해당 point cloud 가 나타내고 있던 전반적인 object category 나 segmentation 등이 변형되면 안 됩니다.
PointNet Architecture
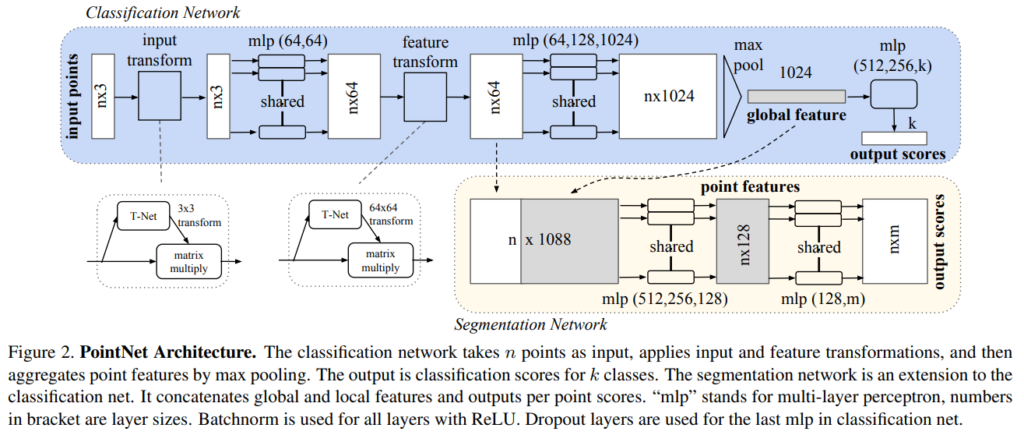
PointNet 의 전체적인 구조는 위 Fig 2 에 나타나있습니다. 이 network 에는 3가지 핵심 모듈이 있습니다.
Symmetry Function for Undordered Input
해당 논문에서는 input permutation 에 invariant 한 network 를 만들기 위해서 가장 마지막에 elements 에 symmetric function 인 max pooling 을 적용합니다. symmetric function 이란 f(x, y, z) = f(y, z, x) = …. 인 변수 교환에 대해 불변인 다변수 함수를 뜻합니다. 저 각 변수들이 points 라 생각했을 때 symmetric function 을 이용하게되면 points 들의 permutation 에 invariant 하도록 만들 수 있게 되는 것 입니다.
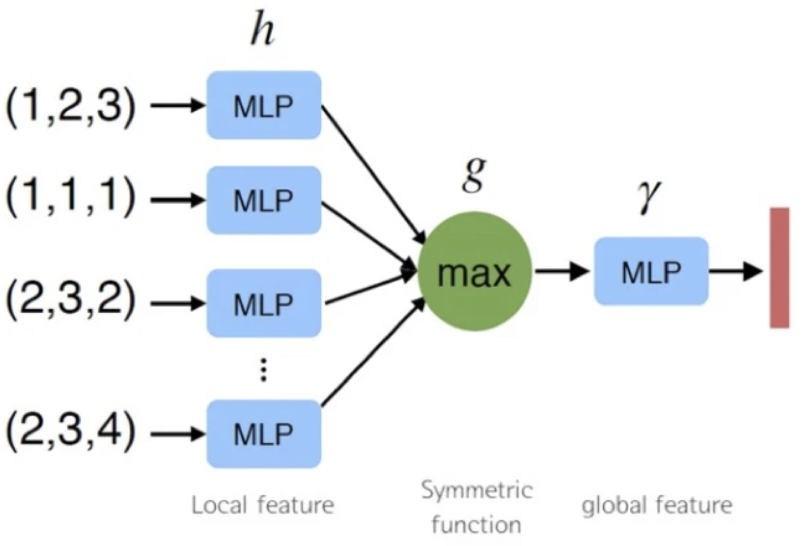
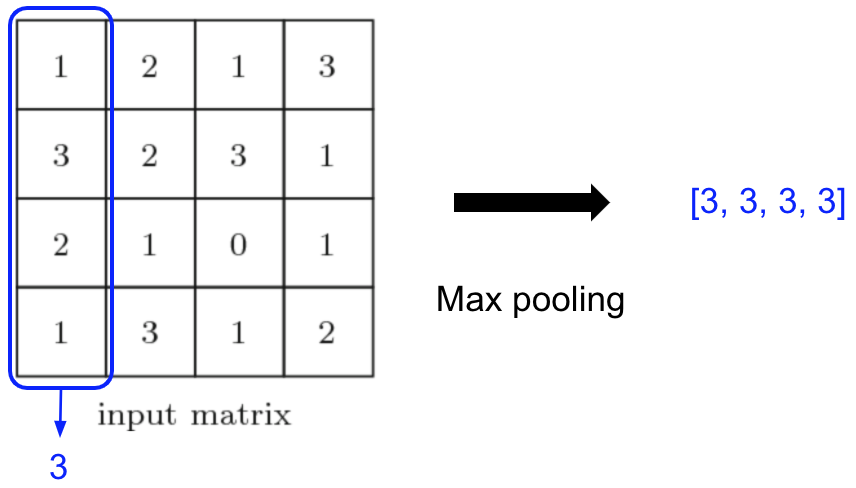
위 그림처럼 각 point 마다 mlp 를 통해서 feature 를 생성하고 그 후 max pooling 를 통해 1024 개의 feature를 생성하게 되는데 이때 생성되는 feature 를 global feature 라고 합니다.
Local and Global Information Aggregation
위에서 생성된 outputs 인 global feature 을 통해서 SVM or multi-layer perceptron classifier 를 통해서 classification 을 진행할 수 있습니다. 하지만 point segmentation 은 local and global feature 가 필요합니다. 위 Fig. 2 의 segmentation network 의 구조를 보면 global feature 를 구하기 전 point feature 를 local feature 로 보고 이 local feature 와 global feature 를 concatenating 하여 segmentation network 에 주어지게 됩니다.
Joint Alignment Network
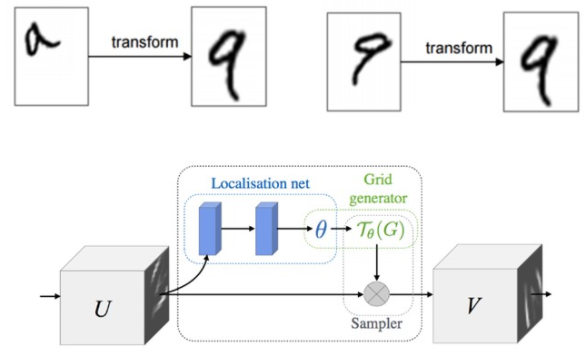
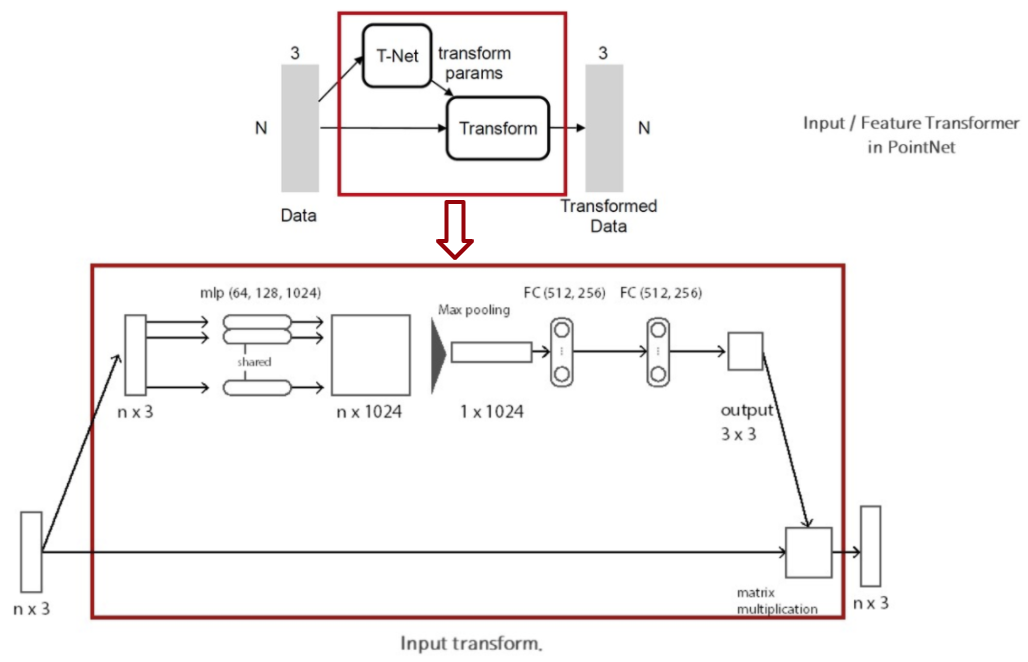
point cloud 의 semantic labeling 은 이 point cloud 에 어떤 특정한 geometric transformation 이 되더라도 변함이 없어야 합니다. 그러기 위해서 이 논문에서는 mini-network 를 통해서 points 를 canonical space 로 보내기 위한 affine transformation matrix 를 prediction 합니다. 그 후 이 matrix 를 input 에 적용하여 위 그림과 같은 효과를 얻을 수 있습니다. mini-network 의 구조는 위 그림에 나타나있습니다. 이러한 구조는 points 에만 적용가능 한 것이 아니라 Fig. 2 에 나타난 것과 같이 이후 feature 의 alignment 를 맞추기 위해서도 적용될 수 있습니다. 그러나 feature space 에서는 훨씬 높은 차원(point: 3, feature: 64) 이므로 optimization 에 있어서 어려움을 겪을 수 있다고 합니다.

그렇기 때문에 위와 같은 regularization term 을 추가할 수 있습니다. 위 식은 transformation matrix 인 A 가 orthogonal 하도록 만들어 주는 식입니다. orthogonal matrix 를 통해 transformation 을 진행하게 되면 input의 고유 모양이 바뀌지 않도록 할 수 있다고 하며 위 식을 추가해주므로써 더 안정적으로 학습할 수 있었다고 합니다.
Experiments
3D Object Classification
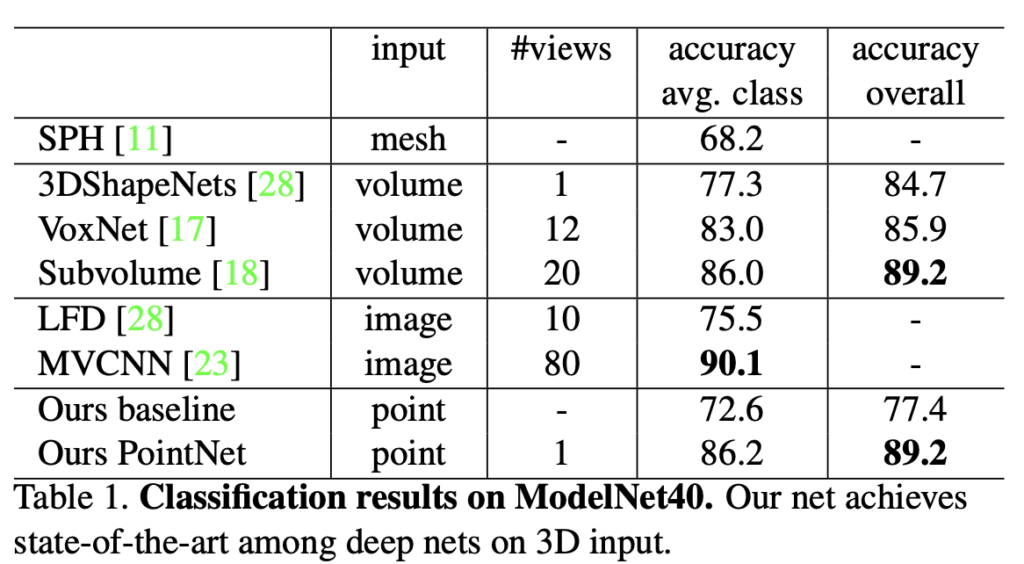
위 표는 여러 input 형식을 통해 기존 방법론들과 PointNet 의 성능을 비교한 표입니다.
3D Object Part Segmentation
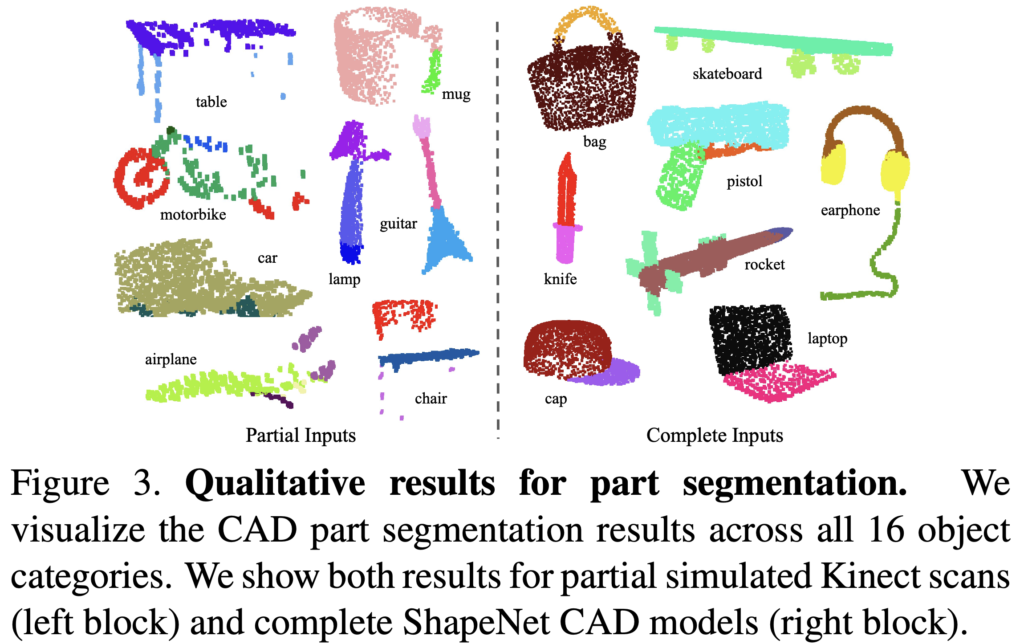
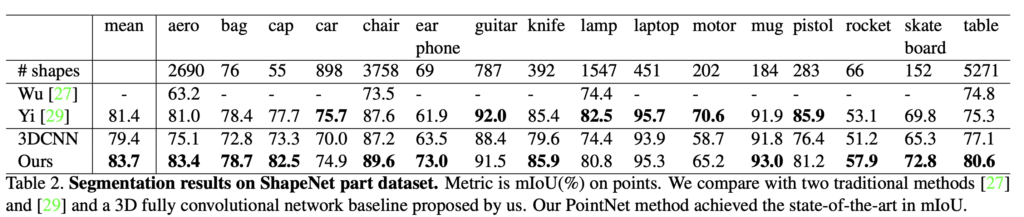
Part segmentation 은 challenging fine-grained 3D recognition task 라고 합니다. Fig. 3 와 같은 형태로 이 task는 3D scan 이나 mesh model 이 주어졌을 때, 그것의 각 part 별로 category labeling 을 진행하는 것 입니다. Table 2 에는 해당 task 에 대한 성능 지표가 나타나있습니다.
Semantic Segmentation in Scens
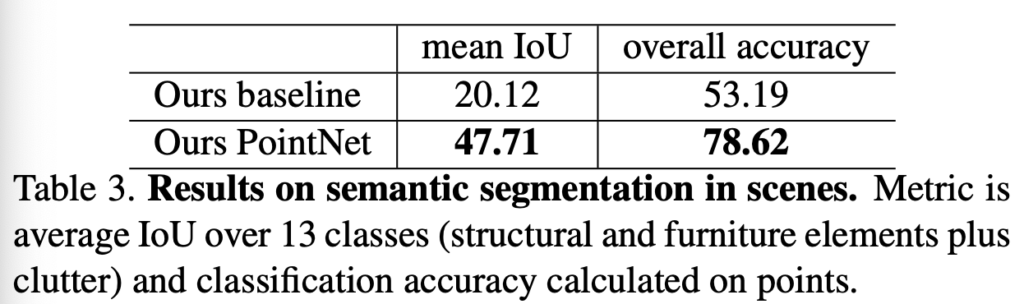
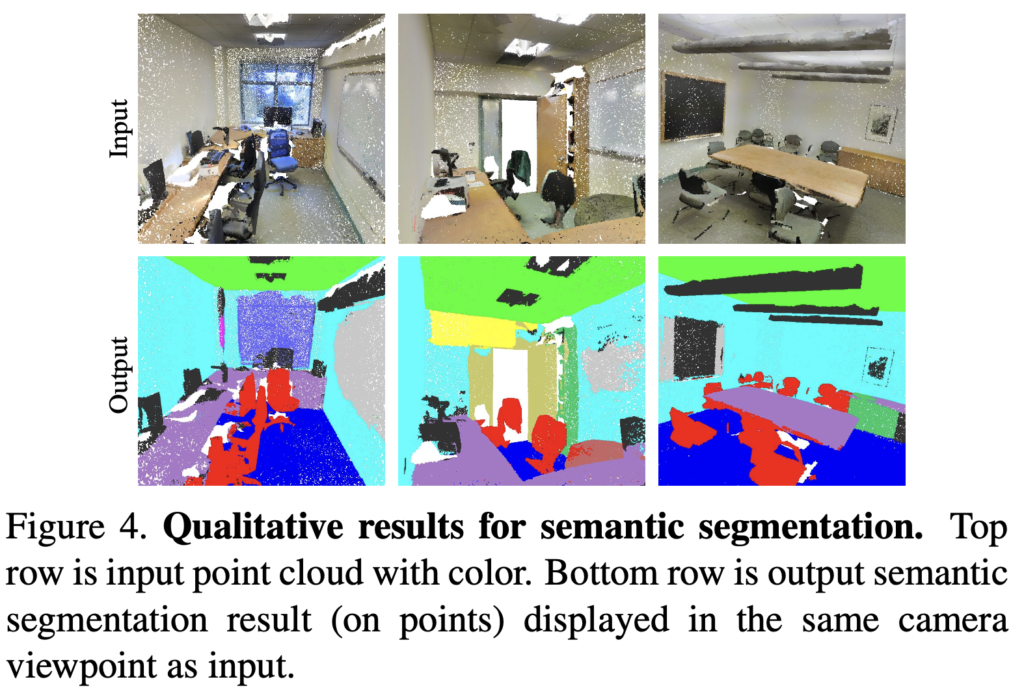
semantic segmentation 에서도 이전 sota 와 비교했을 때 상당한 성능의 향상을 보였다고 합니다.
리뷰 잘 읽었습니다.
중간중간 디테일이 빠져있는 것 같지만 이해하는데는 큰 문제가 없었네요.
한가지 궁금한게 있는데 논문에서 사용하는 input 및 feature transformation은 Classification task와 Segmentation task에 모두 사용되는 것인가요?
일반적으로 3D가 아닌 2D Image에서도 위와같이 Feature transformation을 수행하는 논문이 있었는데 해당 논문은 Image Classification만을 수행했었거든요. 아무래도 Classification과 달리 Segmentation의 경우 픽셀레벨에서 예측하다보니 transformation하여 각 픽셀에 변형을 일으키면 원래 입력과 최종 output이 다르게나타나지 않을까 라는 의문을 가지고 있었는데, 해당 분야는 3D여서 크게 상관없는 것인가요?
네 이 논문에서는 해당 transformation 을 Classification 및 Segmentation 모두에 적용하고 있습니다.
여기서 segmentation 을 각 point 별 classification 으로 정의하여 해결하고 있습니다. 각 point 별로 transformation 을 진행해서 segmentation 을 진행하고 그 각 point 별로 transformation 되기 이전의 점과 1대1로 매칭이 되기 때문에 해당 결과 또한 기존의 point 로 매칭 되는 식으로 진행된다고 이해했습니다.
제가 생각한 3D Detection 논문이 아니였네요. ㅋㅋ. 이 논문 이후에 3D Detection 방법론들이랑 많이 유사할지 의문인데 혹시 찾아보신거 있나요..?
해당 논문에서는 3D Detection 을 주로 다루는 것은 아니었으나 제가 듣기로 이와 같이 3D 상 데이터중 point cloud 를 다룰 때 이 PointNet 과 같은 구조가 backbone 으로 사용되곤 한다고 들어서 이후 다른 방법론의 이해에도 도움이 될거라 기대하고 있습니다… 아직 다른 3D Detection 관련해서는 자세히 찾아보지는 못 했습니다.