Before Review
이번에도 Temporal Action Localization 논문 리뷰입니다. 18년도 CVPR에 나온 논문이며 , 저번에 리뷰한 R-C3D보다 발전된 네트워크라는 생각이 들었습니다.
- [CVPR 2016] Temporal Action Localizations in Untrimmed Videos via Multi-stage CNNs
- [ICCV 2017] R-C3D Region Convolutional 3D Network for Temporal Action Localization
위의 두 개의 리뷰는 Temporal Action Localization을 수행할 때 단순히 Object Detection의 Pipeline을 적용하기 급급했던 느낌이 들었지만 , 이번 리뷰는 Object Detection의 Pipeline을 Temporal Action Localization에 적용하면 어떤 점이 문제가 있는지 문제를 제기하고 , 이를 개선시킨 논문입니다.
뭔가 주제를 하나 잡고 이게 어떻게 발전되고 있는지 추적하면서 논문 읽는 재미가 꽤 있는 거 같습니다. 논문 리뷰 시작하겠습니다.
Introduction
다른 Temporal Action Localization 논문과 비슷하게 시작합니다. Trimmed Video에서 Action Recognition 부분에서는 나름의 Progress가 있지만 , Untrimmed Video에서 Temporal Action Localization은 어려운 문제이기도 하지만 중요한 문제다 이렇게 얘기하고 있습니다. Temporal Action Localization은 Object Detection과 Pipeline이 비슷하여 , 당시 Temporal Action Localization의 접근 방식은 R-CNN 계열의 detection 구조를 착안하여 이를 Temporal Action Localization에 적용하는 방식이었습니다.
하지만 R-CNN 계열의 detection pipeline은 이미지 부분에서 성공적이었지 , 이를 video에 적용하려는 domain shift과정에서 발생할 수 있는 Gap을 고민해야 한다고 저자는 주장합니다.
즉 , Object Detection의 파이프라인을 사용하지만 이를 Video의 상황에 사용하기에 앞서 어떤 문제점이 발생할 수 있는지 정의하고 , 이를 개선하기 위해서 어떤 방법을 사용해야 하는지 제안하는 것이 본 논문의 Contribution이라 볼 수 있습니다. 저자는 아래와 같은 세 가지 의문점을 던지게 됩니다
- How to Handle large variations in action durations?
Object Detection에서는 box들의 scale은 다르지만 , 그렇다고 그 bounding box들의 크기 차이가 크지 않습니다. 하지만 Temporal Action Localization 상황에서 Action 영역의 길이는 정말 몇 초에서 몇 분 이 정도로 제각각이라 비디오 구간 영역의 후보군을 만들어낼 때 약간 곤란한 상황이 발생합니다. 비디오의 길이가 정말 제각각인데 Receptive Field는 어떻게 설계해야 할까?
- How to utilize temporal context?
Temporal Context Information이란 어떠한 instance 전후로 무슨 일이 일어나는지에 대한 정보를 의미합니다. 이는 비디오를 해석하는 데 정말 중요하게 사용이 될 수 있는 데 , 연기가 나고 있는 전투기가 아래로 추락하고 있다면 우리는 그 후에 이 전투기가 지상에 충돌하여 폭발할 것을 예상할 수 있습니다. 또 예를 들면 다이빙 대에 사람이 서 있다면 우리는 그 사람이 곧 다이빙을 할 것이라고 예상할 수 있습니다. 그렇다면 이렇게 Temporal Context Information을 잘 표현하는 Feature들은 어떻게 추출할 수 있을까?
- How best to fuse multi-stream features
Action Recognition에서 좋은 효과를 보여주는 RGB-Video Frame과 Optical Flow를 fusion 시켜주는 시도를 저자는 Temporal Action Localization에서 적용을 하려고 하는 데 , 이것을 어떻게 설계하면 좋을 까에 대한 고민입니다.
제가 여기서 적은 의문점들을 저자는 Faster-RCNN 구조에 수정을 가해 TAL-Net이라는 network를 설계합니다. 간단하게 Faster R-CNN 파이프라인을 살펴보고 TAL-Net을 보도록 하겠습니다.
Faster R-CNN
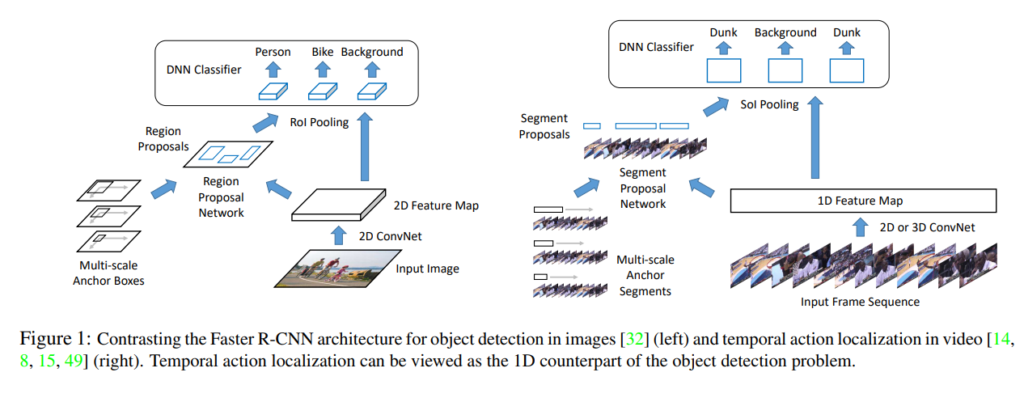
Faster R-CNN은 object detection에서 진정한 End to End 방식을 접목시킨 Two-stage Detector입니다. Proposal generation stage와 classification stage로 구성이 되어 있는 데 위의 사진 중 왼쪽 그림을 보시면 됩니다.
먼저 , Input image가 들어오면 Feature map을 만들어내는 2D ConvNet을 통하여 2D Feature Map을 만들어주고 , 또 다른 2D ConvNet을 사용하여 , region proposal들을 만들어냅니다. Region Proposal Network에서 어떻게 작동하는지 궁금하신 분들은 [CVPR 2015] Faster R-CNN : Towards Real-Time Object Detection with Region Proposal Network 논문을 참고하시면 될 것 같습니다.
만들어진 Region Proposal에서는 RoI pooling을 사용하여 , 고정된 크기의 Feature map을 만들어줍니다. RoI Pooling을 통해서 나온 Feature를 가지고 DNN Classifier를 돌려서 Classification과 Box Regression을 진행해줍니다.
TAL-Net
위에 Introduction 부분에서 얘기한 세 가지 의문점들을 이제 하나씩 해결해보도록 하겠습니다.
Receptive Field Alignment
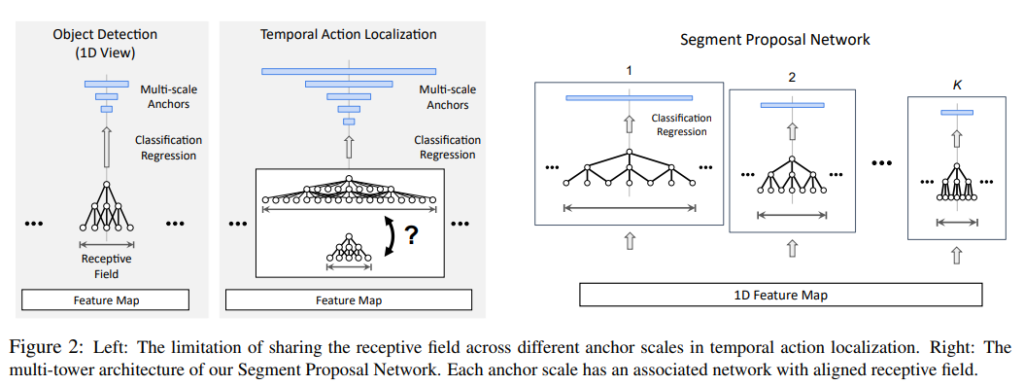
Proposal Generation 부분에서 Proposal들을 만들어주는 방식은 Detection 진영에서 보통 K개의 Filter를 가지고 1 by 1 Conv를 진행해준다고 합니다. 여기서 K는 scale의 개수가 됩니다. 이러한 방식은 Temporal Action Localization에서는 문제점을 가집니다. 이유는 위에서 언급한 것처럼 Temporal Action의 길이는 정말 다양하게 존재하는 데 , 고정된 Receptive Field를 가지고 진행해주면 다음의 문제가 생깁니다.
만약 Receptive Field를 크게 가지도록 고정시킨 상태라면 Large Anchor에 대해서는 적합하겠지만 , Small Anchor에는 불필요한 정보가 너무 많게 됩니다. 반대로 Receptive Field를 작게 가지도록 고정시킨 상태라면 , Small Anchor에는 적합하겠지만 , Large Anchor에는 정보가 부족하게 됩니다.
이러한 문제를 해결하기 위해 저자는 각 Anchor의 Temporal 길이에 맞춰서 Adaptive 한 Receptive Field를 가질 수 있는 방법을 고안합니다.
위의 그림에서 오른쪽을 살펴보면 Input으로는 1D Feature map이 들어가게 되고 , Anchor Segment들의 Scale에 따라서 Receptive Field를 다르게 취해주고 있습니다. 만들어줄 Anchor Segment의 Scale이 크다면 , Receptive Field는 크게 잡아주고 , 작다면 Receptive Field를 작게 잡아주고 있습니다.
“그렇다면 어떻게??”가 중요하겠죠 이제 천천히 살펴보면
예를 들어 우리가 원하는 Receptive field의 size를 s 라 두겠습니다.
단순하게 Convolution Filter들을 쌓아서 Receptive Field를 넓혀주는 방식은 가장 간단하지만 추가적으로 쌓아야 하는 Layer의 개수가 s 와 거의 Linear 하게 증가한다고 합니다. 쉽게 말해서 비효율적이죠 parameter 수가 많아지니… Pooling Layer를 이용하는 건 이보다는 낫지만 Resolution이 낮아지면서 Localization Accuracy를 희생하게 되는 구조가 되어버립니다.
Receptive field를 늘려주고 싶지만 Parameter 수를 많이 사용하고 싶지 않고 , Resolution을 살려주고 싶은 상황입니다. 저자는 Dilated Convolutuion을 제안합니다. Dilated Convolution의 작동 방식은 아래와 같습니다.
- Dilated Convolution(Atrous Convolution)
Dilated Convolution을 사용하면 지금 해결하고 싶은 상황을 해소할 수 있습니다. Receptive Field를 늘리면서 , Parameter 수는 그대로 가져가고 , Resolution은 줄어들지 않는 상황입니다.(물론 Padding은 이에 맞춰서 진행해야 합니다.)
여기서 dilation rate(sampling rate)를 첫 번째 Filter 같은 경우는 r1 = s / 6 두 번째 Filter 같은 경우는 r2 = 2 * s / 6로 정의해서 원하는 Target Receptive Field에 맞춰서 연산을 수행합니다.
이렇게 해서 Temporal Action Localization에서 Action의 Temporal 길이가 제각각인 문제점을 해결할 수 있었습니다.
Context Feature Extraction
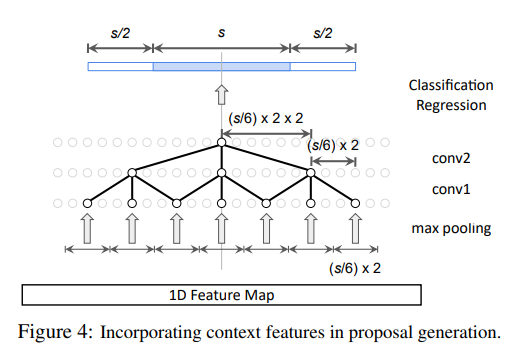
위에서 Temporal Context를 이해하는 것이 비디오를 이해할 때 중요하다고 예시를 들면서 설명을 했습니다. Dilated Convolution을 사용하면 Receptive Field를 Anchor에 scale에 맞게 설계할 수 있었습니다. 하지만 이 상황은 Anchor에 대한 Feature만 추출하는 상황입니다. 예를 들면 이 Anchor가 action을 담고 있다고는 하지만 이 전후의 상황도 고려하고 싶기 때문에 여기서 Receptive Field를 더 늘려주게 됩니다.
어떤 Anchor를 담당해주는 Receptive Field를 s 라고 할 때 , 앞 뒤로 s/2 만큼 늘려주는 방식입니다. 어떻게 해주냐면 간단합니다. Dilated Convolution의 Dilation rate(sampling rate)를 두 배로 늘려주면 됩니다.
첫 번째 Filter : r1 = 2 * s / 6 , 두 번째 Filter : r2 = 2 * 2 * s / 6
좀 더 효과적인 비디오의 이해를 위해 단순히 Anchor 만 보는 것이 아니라 , 그 전후의 상황까지 조금 살펴보겠다는 의도입니다. 여기까지 진행해주면 길이가 제각각인 Feature가 생성되기 때문에 1D RoI pooling 연산을 거쳐준다고 합니다. 그 후 DNN Classifier(fully Connected Layer)를 통해 Classification과 Regression을 진행하게 됩니다.
Late Feature Fusion
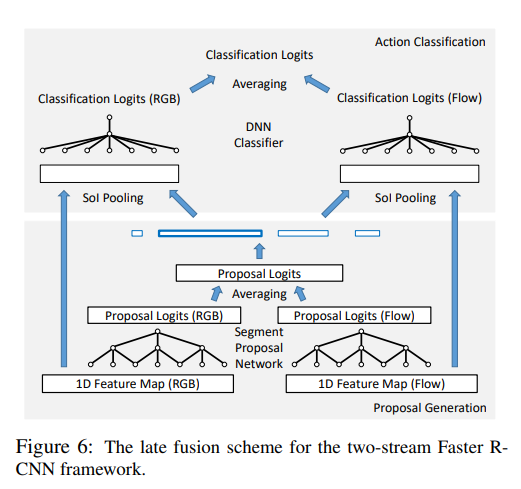
여기서는 Action Recognition 분야에서 자주 애용되던 방식인 RGB-frame과 optical Flow를 fusion 시켜주는 방식을 Temporal Action Localization에서 사용하였다고 합니다.
각각의 forwarding 과정을(RGB , flow) 독립적으로 진행하다가 각각의 Network에서 생성된 Proposal을 element-wise averaging 방식으로 합쳐준다고 합니다. 합쳐준 Proposal을 가지고 독립적으로 Classification 과정을 진행해주고 나온 Classification 결과를 또다시 element-wise averaging 방식으로 합쳐주고 그것을 최종 output으로 사용한다고 합니다.
early fusion 방식으로도 실험을 해보았다고 하는 데 , late fusion 방식이 early fusion 방식보다 더 좋은 성능이 나왔다고 합니다. 위에서 구상한 Pipeline을 독립적으로 진행하다가 중간중간 averaging 하는 방식으로 fusion 되는 구조인 것 같습니다.
Experiments
Averaing Recall(AR) : tIoU를 0.5부터 1.0까지 0.05씩 키워나가면서 Recall을 측정하고 모든 Recall을 평균 내준 것
Average Number of Proposals per Video(AN) : 비디오 당 생성된 Proposal의 평균 개수
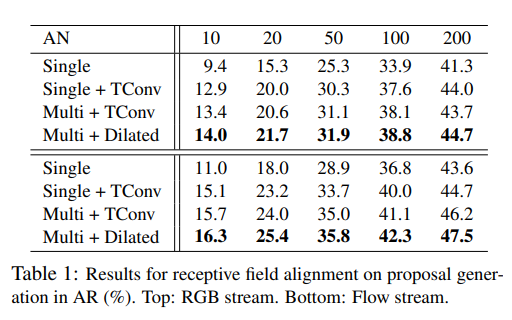
- Results for receptive field alignment
저는 여기서 Single과 Multi의 차이를 이해할 수 없었습니다. 뭐가 다른 건지 아무리 봐도 모르겠더라고요… 핵심은 Dilated Convolution을 통해 , Receptive Field를 Anchor의 scale에 맞게 설정해준 결과가 제일 높게 성능이 측정됐다가 되겠습니다.
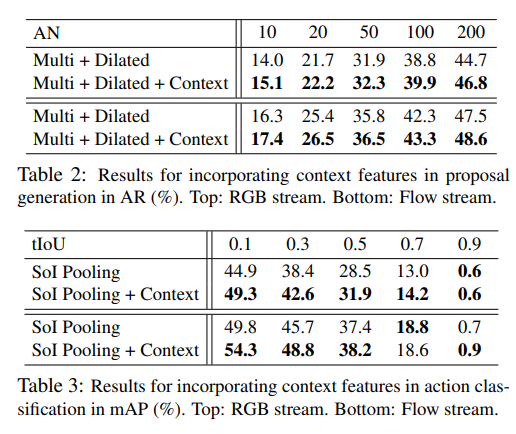
- Results for incorporating context features
아래의 테이블은 RGB frame이나 Optical flow를 입력으로 넣었을 때 Temporal Context 정보를 강화해준 것과 아닌 것의 성능 비교를 나타낸 테이블입니다. 꽤나 의미가 있는 게 이게 context Information을 추가한다고 해서 우리가 정보를 더 많이 사용한 것은 아닌 데 , 즉 Parameter 개수는 동일한데 성능이 개선된 것을 확인할 수 있습니다.

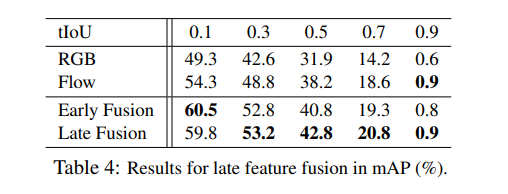
- Results for late fusion
RGB와 Optical flow를 fusion 했을 때 성능 향상입니다. Action Recognition 논문을 제대로 읽어보진 않아서 왜 잘되는지는 잘 모르지만 , 아래 테이블처럼 Temporal Action Localization에서도 성능 향상을 관찰할 수 있습니다.
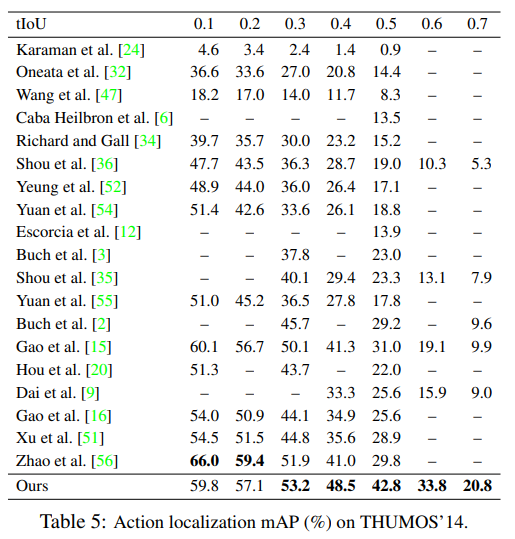
- Action localization mAP on THUMOS’14
TAL-Net이 THUMOS’14 데이터셋에서는 다른 방법론들에 비해서 거의 SOTA급 성능을 달성한 것을 확인할 수 있습니다. 단순히 Detection 방법론을 따라 하는 것이 아니라 Temporal Action Localization에 맞게 끔 조절했기 때문에 어찌 보면 당연한 결과인 것 같기도 합니다.
Conclusion
이 논문의 가장 큰 Contribution은 Temporal Action Localization에서 별 다른 고민 없이 그냥 object detection pipeline을 사용하던 흐름 속에서 , image -> video 이렇게 도메인 변화 과정에서 발생하는 간극을 제시했고 , 이를 해결할 수 있는 파이프라인을 고안한 것이라고 생각합니다. 뭔가 이제 Temporal Action Localization 만의 분석을 통한 Insight를 담은 논문이 나온 것 같습니다. 연구가 더 어떻게 발전되는지 계속 리뷰하도록 하겠습니다.