작성 중
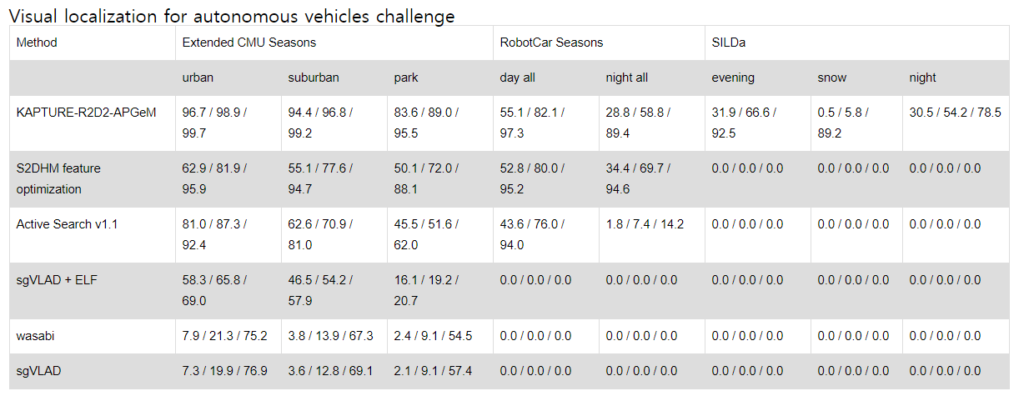
이번에 리뷰할 논문은 CVPR 2020 Workshop: Long-Term Visual Localization, Visual Odometry and Geometric and Learning-based SLAM에서 Autonomous Vehicle Challenge 1등을 쟁취한 Naver Labs의 Robust Image Retrieval-based Visual Localization using Kapture의 근간이 되는 논문을 살펴보고자 합니다.